23 luty 07 (22)
1.1.6.3. Przykłady obliczania ruchliwości mechanizmów płaskich
Obliczenie ruchliwości dla mechanizmów płaskich przedstawiono w przykładach od 1.2 do 1.5 (rys. 1.12-1.15).
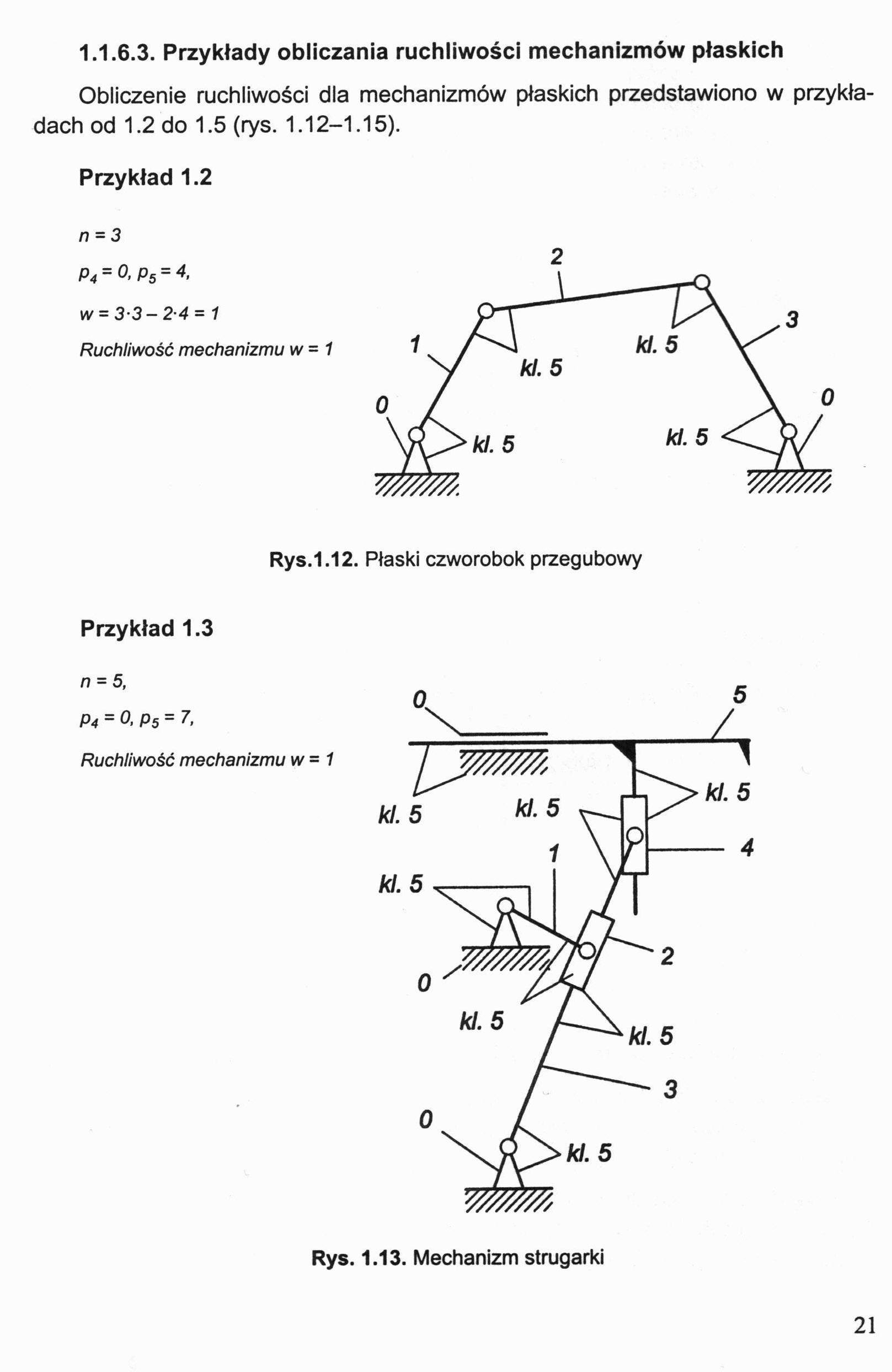
Przykład 1.2 n = 3
2
Rys.1.12. Płaski czworobok przegubowy
p4 = 0,ps = 4, w = 3-3 -2-4-1 Ruchliwość mechanizmu w = 1
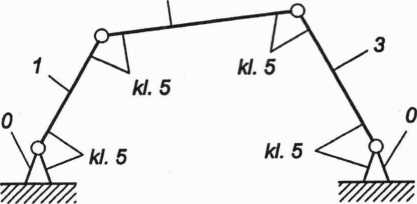
Przykład 1.3
n = 5,
P4 = 0,p5= 7,
Ruchliwość mechanizmu w - 1

Rys. 1.13. Mechanizm strugarki
21
Wyszukiwarka
Podobne podstrony:
23 luty 07 (25) Przykład 1.7 (rys. 1.17)Ruchliwość teoretyczna wt = 3n - 2p5 - p4 = 0. Mechanizm ma
23 luty 07 (140) Przykład 3.3 Mechanizm czworoboku przegubowego Przeprowadzić analizę kinetostatyczn
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
23 luty 07 (60) Przykład 2.2 Mechanizm czworoboku przegubowego Wyznaczymy metodą planów prędkości i
23 luty 07 (71) Przykład 2.5 Mechanizm Oidhama Wyznaczymy metodą planów prędkość i przyspieszenie li
23 luty 07 (146) mi,Jsi B 2 Rozwiązanie Mechanizm, podobnie jak poprzednie, składa się z członu napę
23 luty 07 (21) Przykład 1.1 n = 3p1 = 0,p2 = 0, p3= 1, p4=1, ps=2 Rys. 1.11. Przestrzenny czworobok
23 luty 07 (29) 1.2.1.2. Przykłady zastępowania par klasy 4 parami klasy 5 Przykład 1.9 (rys. 1.20)
23 luty 07 (33) 1.2.1.4. Przykłady klasyfikacji strukturalnej Przykład 1.12 (rys. 1.23) Grupa strukt
23 luty 07 (34) Przykład 1.14 (rys. 1.25) Grupa strukturalna n = 2,ps = 3, wgr = O Grupa strukturaln
23 luty 07 (36) Tabela 1.2 Klasyfikacja funkcjonalna mechanizmów Rodzaj łańcucha
23 luty 07 (37) 1.2.2. Zasady klasyfikacji funkcjonalnej mechanizmów Klasyfikacja strukturalna mecha
23 luty 07 (83) W celu obliczenia przyspieszenia kątowego różniczkujemy (P2.47) względem czasu A .2
23 luty 07 (86) W celu obliczenia przyspieszeń kątowych różniczkujemy równanie (P2.60) cofli cos(pi
23 luty 07 (89) Rozwiązanie Wpisujemy w analizowany mechanizm zamknięty trójkąt wektorów i zapisujem
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
23 luty 07 (151) 1 1 R0i - O Rys. 3.33. Człon napędzający mechanizmu Oldhama oswobodzony od więzów P
23 luty 07 (20) 1.1.6. Ruchliwość mechanizmu Liczba stopni swobody względem nieruchomej podstawy, kt
23 luty 07 (23) Przykład 1.4 n = 2 p4= 1, ps = 2, iv= 1 Rys. 1.14. Mechanizm krzywkowy z popychaczem
więcej podobnych podstron