23 luty 07 (151)
1
1

R0i - O
Rys. 3.33. Człon napędzający mechanizmu Oldhama oswobodzony od więzów
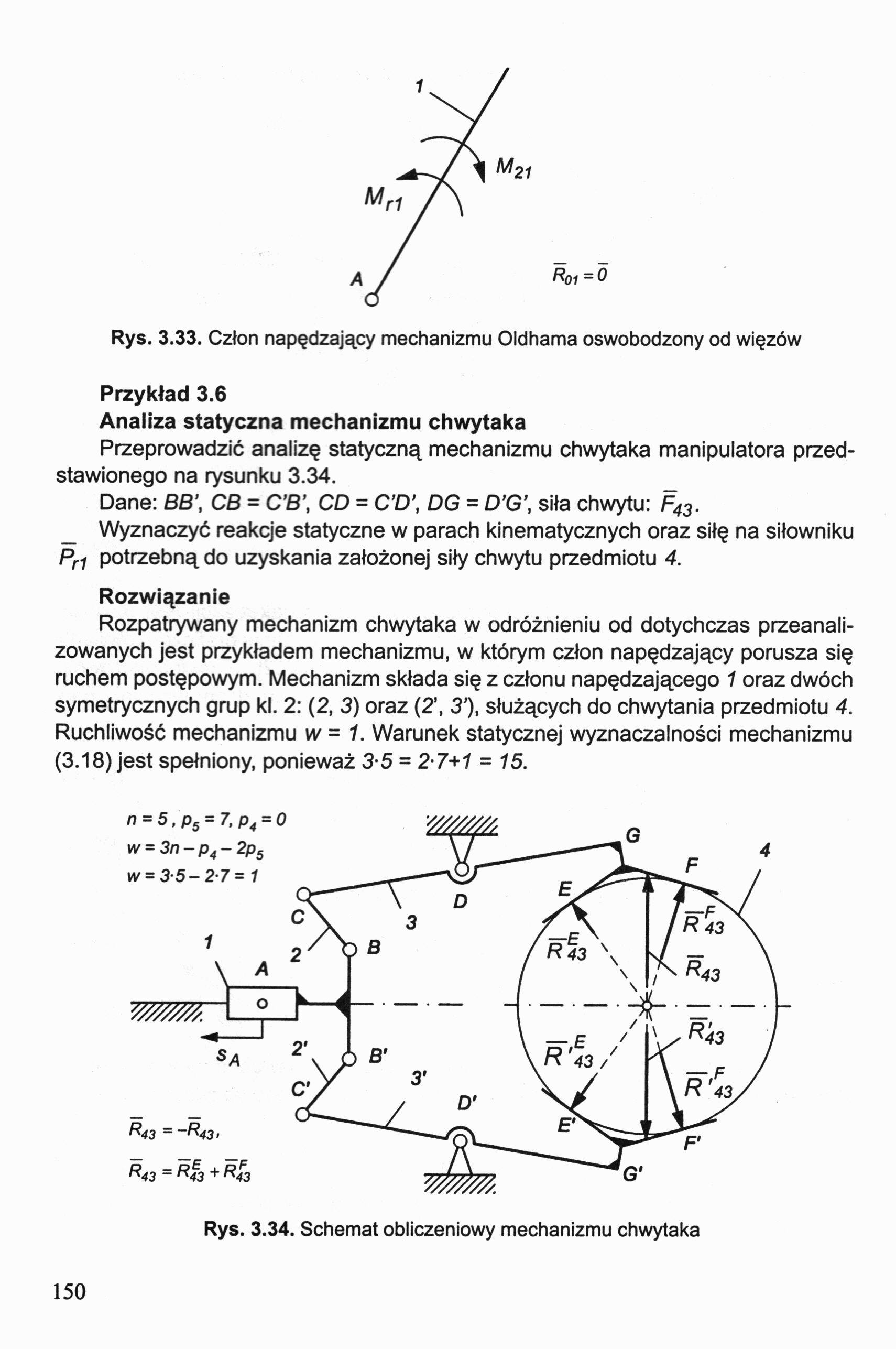
Przykład 3.6
Analiza statyczna mechanizmu chwytaka
Przeprowadzić analizę statyczną mechanizmu chwytaka manipulatora przedstawionego na rysunku 3.34.
Dane: BB\ CB = C’B', CD = C’D\ DG = D’G\ siła chwytu: F43.
Wyznaczyć reakcje statyczne w parach kinematycznych oraz siłę na siłowniku Pr1 potrzebną do uzyskania założonej siły chwytu przedmiotu 4.
Rozwiązanie
Rozpatrywany mechanizm chwytaka w odróżnieniu od dotychczas przeanalizowanych jest przykładem mechanizmu, w którym człon napędzający porusza się ruchem postępowym. Mechanizm składa się z członu napędzającego 1 oraz dwóch symetrycznych grup kl. 2: (2, 3) oraz (2’, 3'), służących do chwytania przedmiotu 4. Ruchliwość mechanizmu w = 1. Warunek statycznej wyznaczalności mechanizmu (3.18) jest spełniony, ponieważ 3-5 = 2-7+1 = 15.

150
Wyszukiwarka
Podobne podstrony:
23 luty 07 (24) Oznacza to, że człon 3 (krążek) w wariancie A jest kinematycznie zbędny. Tworzy on j
23 luty 07 (33) 1.2.1.4. Przykłady klasyfikacji strukturalnej Przykład 1.12 (rys. 1.23) Grupa strukt
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (139) Równanie wektorowe równowagi sił działających na człon napędzający ma postać (P3.9)
23 luty 07 (13) Człon swobodny posiada na płaszczyźnie trzy stopnie swobody: dwa przesunięcia xA, yA
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (148) Równanie równowagi sił działających na człon napędzający ma postać R21 + Bi + Rqi +
23 luty 07 (149) Uwalniając suwak od więzów (rys. 3.31) naieżałobyzatem przyłożyć normalne siły reak
23 luty 07 (150) Uwalniamy teraz od więzów grupę strukturalną (2, 3) (rys. 3.32a). a) / b) 3 C *03 R
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (19) Schemat kinematyczny w układzie płaskim V Rys. 1.10. Sporządzanie schematu kinematyc
więcej podobnych podstron