23 luty 07 (13)
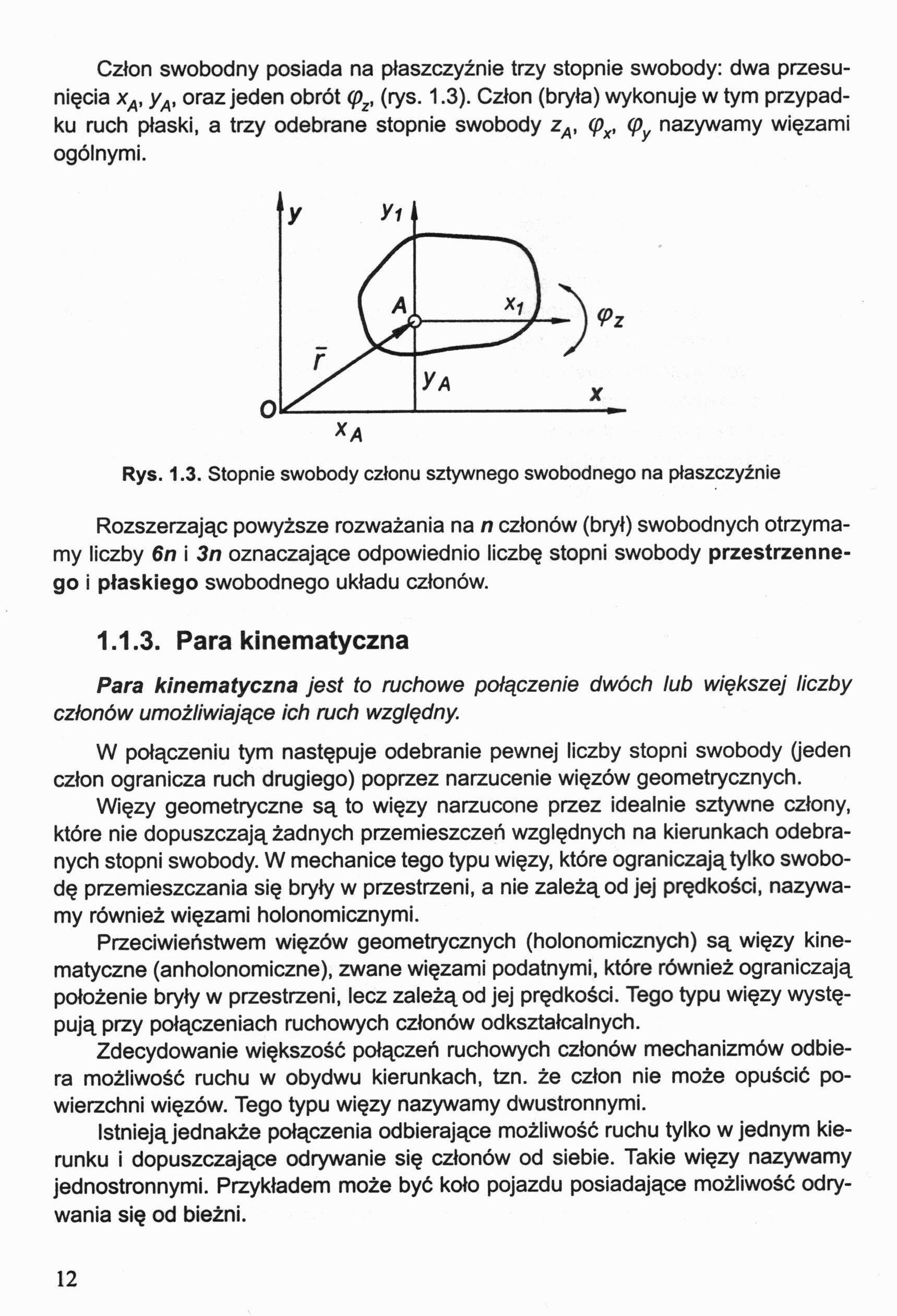
Człon swobodny posiada na płaszczyźnie trzy stopnie swobody: dwa przesunięcia xA, yA, oraz jeden obrót (pz, (rys. 1.3). Człon (bryła) wykonuje w tym przypadku ruch płaski, a trzy odebrane stopnie swobody zA, (px, (py nazywamy więzami ogólnymi.
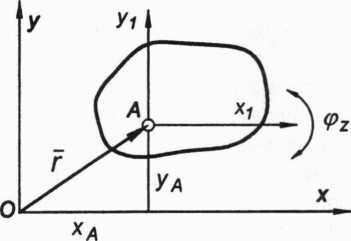
Rys. 1.3. Stopnie swobody członu sztywnego swobodnego na płaszczyźnie
Rozszerzając powyższe rozważania na n członów (brył) swobodnych otrzymamy liczby 6n i 3n oznaczające odpowiednio liczbę stopni swobody przestrzennego i płaskiego swobodnego układu członów.
1.1.3. Para kinematyczna
Para kinematyczna jest to ruchowe połączenie dwóch lub większej liczby członów umożliwiające ich ruch względny.
W połączeniu tym następuje odebranie pewnej liczby stopni swobody (jeden człon ogranicza ruch drugiego) poprzez narzucenie więzów geometrycznych.
Więzy geometryczne są to więzy narzucone przez idealnie sztywne człony, które nie dopuszczają żadnych przemieszczeń względnych na kierunkach odebranych stopni swobody. W mechanice tego typu więzy, które ograniczają tylko swobodę przemieszczania się bryły w przestrzeni, a nie zależą od jej prędkości, nazywamy również więzami holonomicznymi.
Przeciwieństwem więzów geometrycznych (holonomicznych) są więzy kinematyczne (anholonomiczne), zwane więzami podatnymi, które również ograniczają położenie bryły w przestrzeni, lecz zależą od jej prędkości. Tego typu więzy występują przy połączeniach ruchowych członów odkształcalnych.
Zdecydowanie większość połączeń ruchowych członów mechanizmów odbiera możliwość ruchu w obydwu kierunkach, tzn. że człon nie może opuścić powierzchni więzów. Tego typu więzy nazywamy dwustronnymi.
Istnieją jednakże połączenia odbierające możliwość ruchu tylko w jednym kierunku i dopuszczające odrywanie się członów od siebie. Takie więzy nazywamy jednostronnymi. Przykładem może być koło pojazdu posiadające możliwość odrywania się od bieżni.
12
Wyszukiwarka
Podobne podstrony:
23 luty 07 (61) Prędkość punktu K znajdziemy na podstawie układu równań (P2.13), porównując ich praw
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (49) 1 B człon w ruchu płaskim W celu wyznaczenia chwilowego środka obrotu członu 2 rysuj
23 luty 07 (139) Równanie wektorowe równowagi sił działających na człon napędzający ma postać (P3.9)
23 luty 07 (148) Równanie równowagi sił działających na człon napędzający ma postać R21 + Bi + Rqi +
23 luty 07 (14) Odbieranie bryle stopni swobody polega na narzuceniu więzów w określonych kierunkach
23 luty 07 (20) 1.1.6. Ruchliwość mechanizmu Liczba stopni swobody względem nieruchomej podstawy, kt
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (108) Rozwiązanie Przełożenie przekładni można zapisać /)3 = —. 3j Wykorzystamy wzór na
23 luty 07 (115) 2) Ze względu na moc siły uogólnionej, siły możemy podzielić na s
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (119) W równaniach (3.1) i (3.2) przyjęto oznaczenia: Pi - wektor główny sił zewnętrznych
23 luty 07 (121) Siły bezwładności przyłożone do członu w ruchu obrotowym Przypadek ogólny przedstaw
23 luty 07 (127) rysunki 3.11 b i c - dwa rozłączone człony z przyłożonymi siłami reakcji przesunięt
23 luty 07 (131) Dwa pierwsze równania (3.21) przedstawiają sumy współrzędnych wszystkich sił działa
23 luty 07 (136) Wyznaczamy siły ciężkości: G? = m^g, G2 = m2g, G3 = m3g. Na mechanizm działa dodatk
23 luty 07 (137) Zapisujemy wektorowe równania równowagi sił działających na człony 2 i 3: dla człon
23 luty 07 (141) Mechanizm obciążony siłami zewnętrznymi, czyli siłami bezwładności i oporu użyteczn
więcej podobnych podstron