23 luty 07 (131)
Dwa pierwsze równania (3.21) przedstawiają sumy współrzędnych wszystkich sił działających na /'-ty człon względem osi Ox i Oy, a trzecie - sumę współrzędnych momentów wszystkich sił względem dowolnie obranego bieguna.
W metodzie analitycznej można również rozpatrywać równowagę grup strukturalnych, nie jest to jednak konieczne. Metodę analityczną analizy kinetostatycznej mechanizmu przedstawimy na przykładzie czworoboku przegubowego.
Przykład 3.1
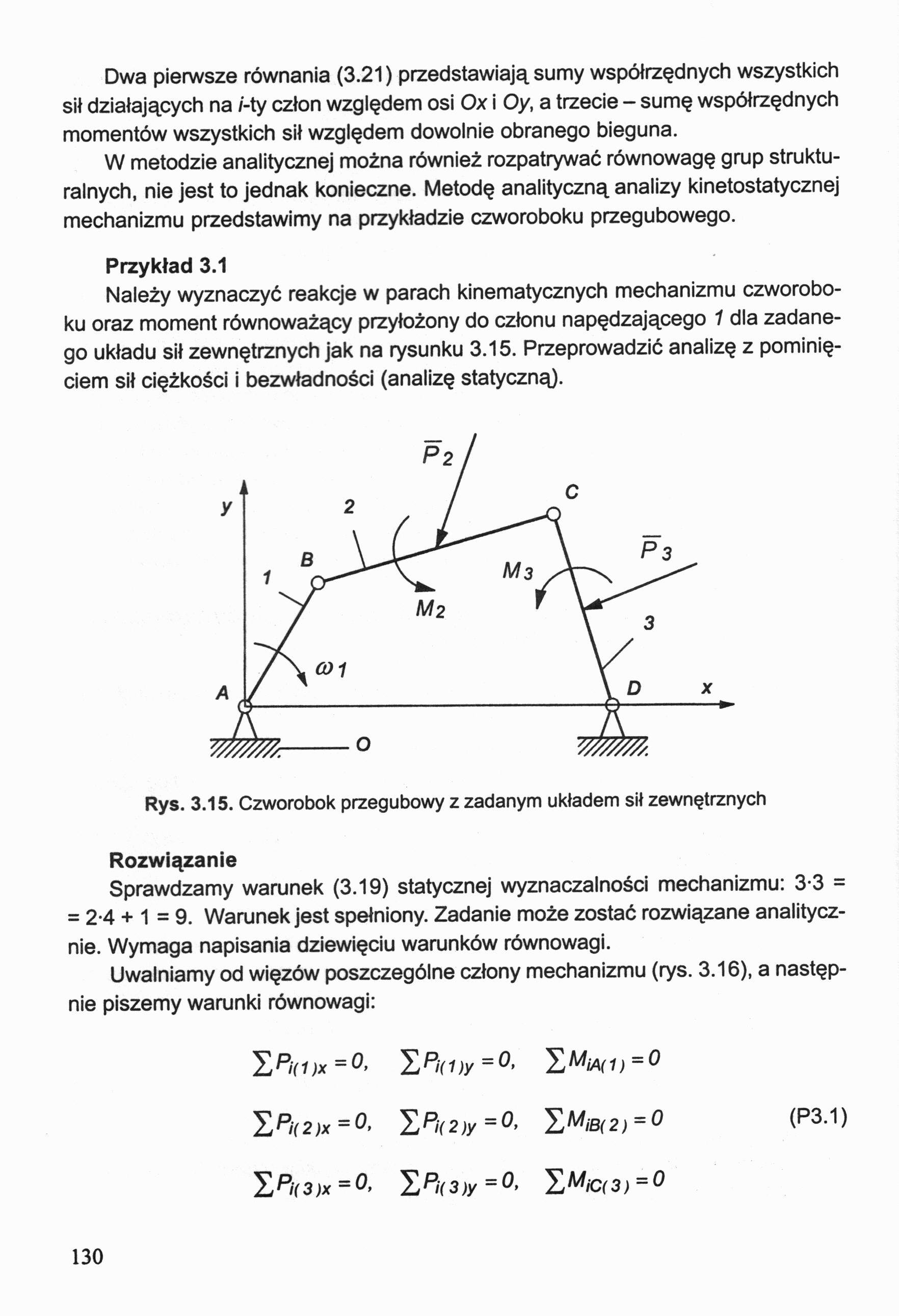
Należy wyznaczyć reakcje w parach kinematycznych mechanizmu czworoboku oraz moment równoważący przyłożony do członu napędzającego 1 dla zadanego układu sił zewnętrznych jak na rysunku 3.15. Przeprowadzić analizę z pominięciem sił ciężkości i bezwładności (analizę statyczną).
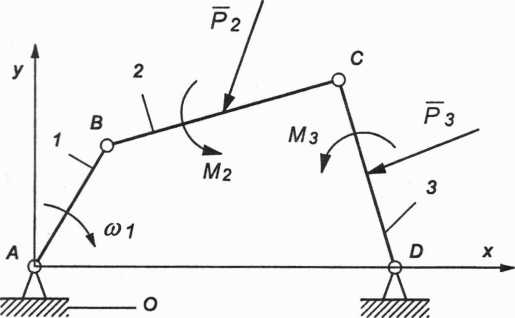
Rys. 3.15. Czworobok przegubowy z zadanym układem sił zewnętrznych Rozwiązanie
Sprawdzamy warunek (3.19) statycznej wyznaczalności mechanizmu: 3-3 = = 24 + 1=9. Warunek jest spełniony. Zadanie może zostać rozwiązane analitycznie. Wymaga napisania dziewięciu warunków równowagi.
Uwalniamy od więzów poszczególne człony mechanizmu (rys. 3.16), a następnie piszemy warunki równowagi:
X Pi( 1 )x =0- X Pi< l)y ~0< X ^iA( 1) = G
lPi(2)x=0, ;Zpi(2,y=0, ZMiB(2) = 0 (P3.1)
lPi(3)x=0, lPi(3)y=0, lMiC(3)=0
130
Wyszukiwarka
Podobne podstrony:
24 luty 07 (42) Rys. 3.68. Analiza statyczna mechanizmu z uwzględnieniem tarcia: a) analiza sił dzia
23 luty 07 (137) Zapisujemy wektorowe równania równowagi sił działających na człony 2 i 3: dla człon
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (57) Następnie piszemy równanie prędkości punktu C, traktując ruch łącznika 2 jako ruch z
23 luty 07 (65) Następnie zapisujemy równanie prędkości punktu S2, który znajduje się na członie 2 s
23 luty 07 (73) Następnie zapisujemy równanie przyspieszenia punktu B2, który znajduje się na członi
23 luty 07 (84) Przekształcamy układ równań (P2.52) do postaci: If coscpi +l2 cos(p2 -10 = -l3 cosę3
23 luty 07 (19) Schemat kinematyczny w układzie płaskim V Rys. 1.10. Sporządzanie schematu kinematyc
21(4) suma składowych wzdłuż osi x wszystkich sił działających na ciało jest ?rócjf składowej przysp
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (90) W celu znalezienia prędkości kątowych i liniowych jarzma 3 różniczkujemy pierwsze z
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (119) W równaniach (3.1) i (3.2) przyjęto oznaczenia: Pi - wektor główny sił zewnętrznych
23 luty 07 (120) Zgodnie z zasadą d Alemberta zagadnienia dynamiki zapisane równaniami (3.1) i (3.2)
23 luty 07 (127) rysunki 3.11 b i c - dwa rozłączone człony z przyłożonymi siłami reakcji przesunięt
23 luty 07 (130) Jeżeli w mechanizmie zastąpimy pary kinematyczne ki. 4 parami ki. 5, to równanie (3
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (133) Rozwiązanie w układzie płaskim dowolnego równania wektorowego, czyli narysowanie pl
więcej podobnych podstron