23 luty 07 (120)
Zgodnie z zasadą d'Alemberta zagadnienia dynamiki zapisane równaniami (3.1) i (3.2) zostały sprowadzone do zagadnień statyki, czyli równowagi statycznej układu sił, zapisanych równaniami (3.7) i (3.8). Jest to szczególnie użyteczne dla wyznaczenia tzw. reakcji dynamicznych w mechanizmie, tj. reakcji powstających w czasie ruchu mechanizmu. Na podstawie równań (3.7) i (3.8) przeprowadza się analizę kinetostatyczną mechanizmu. Jeżeli siły bezwładności są małe to można je pominąć w rozważaniach i wówczas równania te przyjmują postać:
Pi +Rj=0 (3.9)
Mpj + Mpj = 0 (3.10)
Na podstawie równań (3.9) i (3.10) przeprowadza się analizę statyczną poruszającego się mechanizmu.
3.3.3. Zasady wyznaczania sił bezwładności
w ruchu postępowym, obrotowym i płaskim
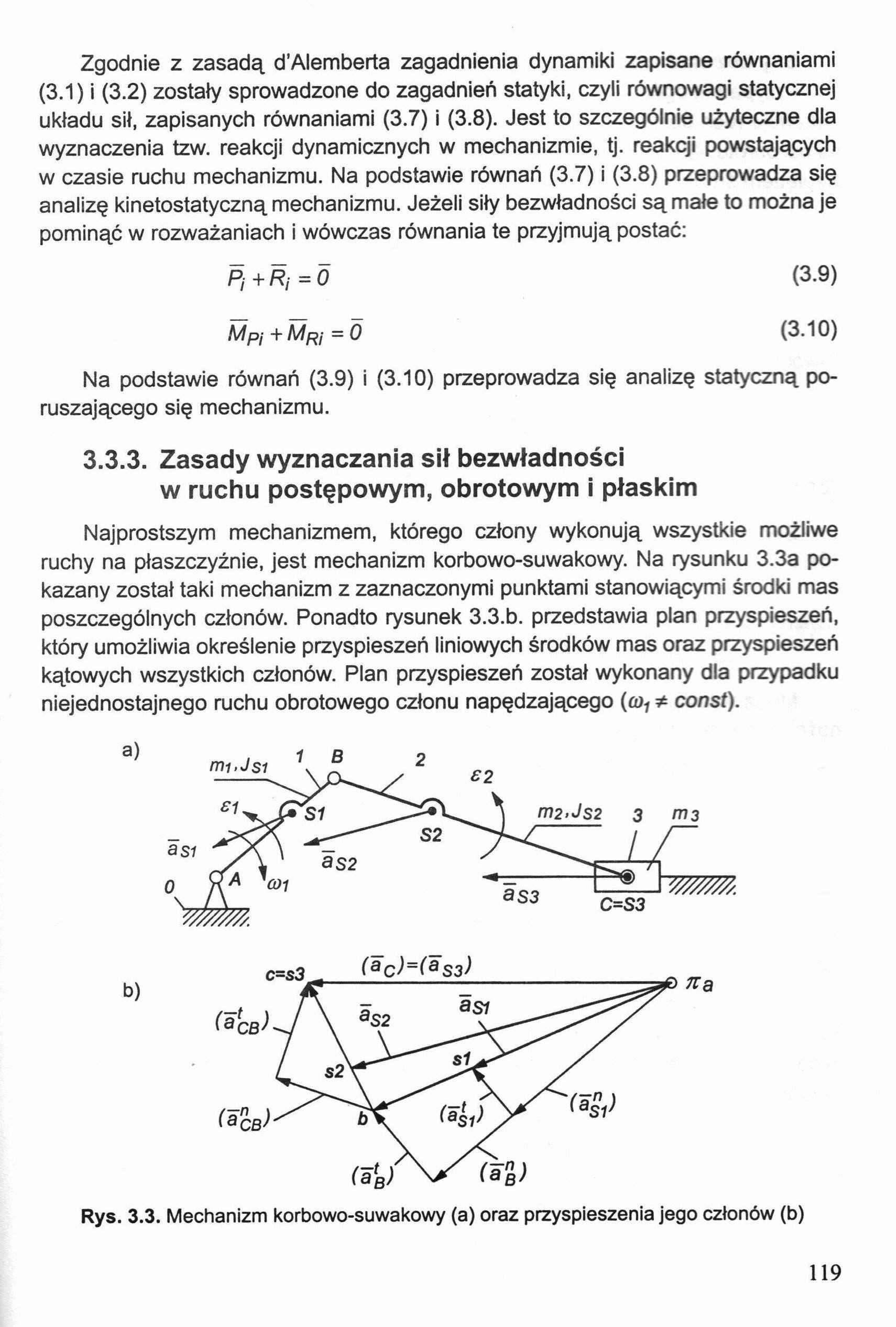
Najprostszym mechanizmem, którego człony wykonują wszystkie możliwe ruchy na płaszczyźnie, jest mechanizm korbowo-suwakowy. Na rysunku 3.3a pokazany został taki mechanizm z zaznaczonymi punktami stanowiącymi środki mas poszczególnych członów. Ponadto rysunek 3.3.b. przedstawia plan przyspieszeń, który umożliwia określenie przyspieszeń liniowych środków mas oraz przyspieszeń kątowych wszystkich członów. Plan przyspieszeń został wykonany dla przypadku niejednostajnego ruchu obrotowego członu napędzającego (tu, * const).
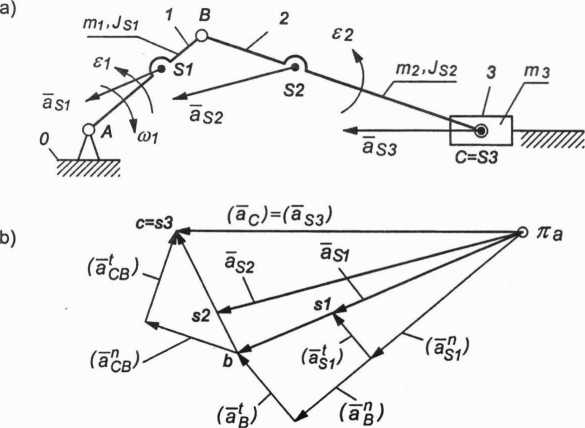
Rys. 3.3. Mechanizm korbowo-suwakowy (a) oraz przyspieszenia jego członów (b)
119
Wyszukiwarka
Podobne podstrony:
23 luty 07 (135) Grafoanalityczna metoda wyznaczania reakcji dynamicznych w parach kinematycznych wy
23 luty 07 (39) Stosowane są również metody grafoanalityczne, które w zasadzie można zaliczyć do met
23 luty 07 (61) Prędkość punktu K znajdziemy na podstawie układu równań (P2.13), porównując ich praw
23 luty 07 (87) Rozwiązanie Na podstawie rysunku 2.30 zapiszemy równanie wektora promienia wodzącego
test3 3 23. Zgodnie z zasadą uprzywilejowania pracownika normy prawa pracy mają co
23 luty 07 * * AA>TEORIA MASZYN I $ Q19-2004 JOZEF FELIS, HUBERT JAWOROWSKI, JACEK CIEŚLIK * *CZE
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (102) koło bjest nieruchome, cob = 0, natomiast koło a i jarzmo są członami ruchomymi, ry
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (105) Ostatecznie przełożenie przekładni obiegowej wyniesiez3y Zj+z3 Zł) Z1 (P2.97) Przeł
23 luty 07 (106) Znak (-) we wzorze (P2.102) oznacza, że zwrot prędkości kątowej satelity 2 jest prz
23 luty 07 (107) Ostatecznie: r-t r2 r-, i • = — ---=— o)1 =---a>i 1 &nbs
23 luty 07 (108) Rozwiązanie Przełożenie przekładni można zapisać /)3 = —. 3j Wykorzystamy wzór na
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
23 luty 07 (10) Ciało sztywne to układ punktów materialnych, w którym wzajemne odległości dwóch dowo
23 luty 07 (110) Schemat kompletnej przekładni różnicowej stożkowej oraz jej schemat bez przesztywni
więcej podobnych podstron