23 luty 07 (107)
Ostatecznie:
(P2.105)
Zatem przełożenie przekładni wynosi:
^l = i3 _ Z1 COi j1 Z-, +z3
(P2.106a)
®1l = y3 = Z1+Z3
coj 1j Z1
(P2.106b)
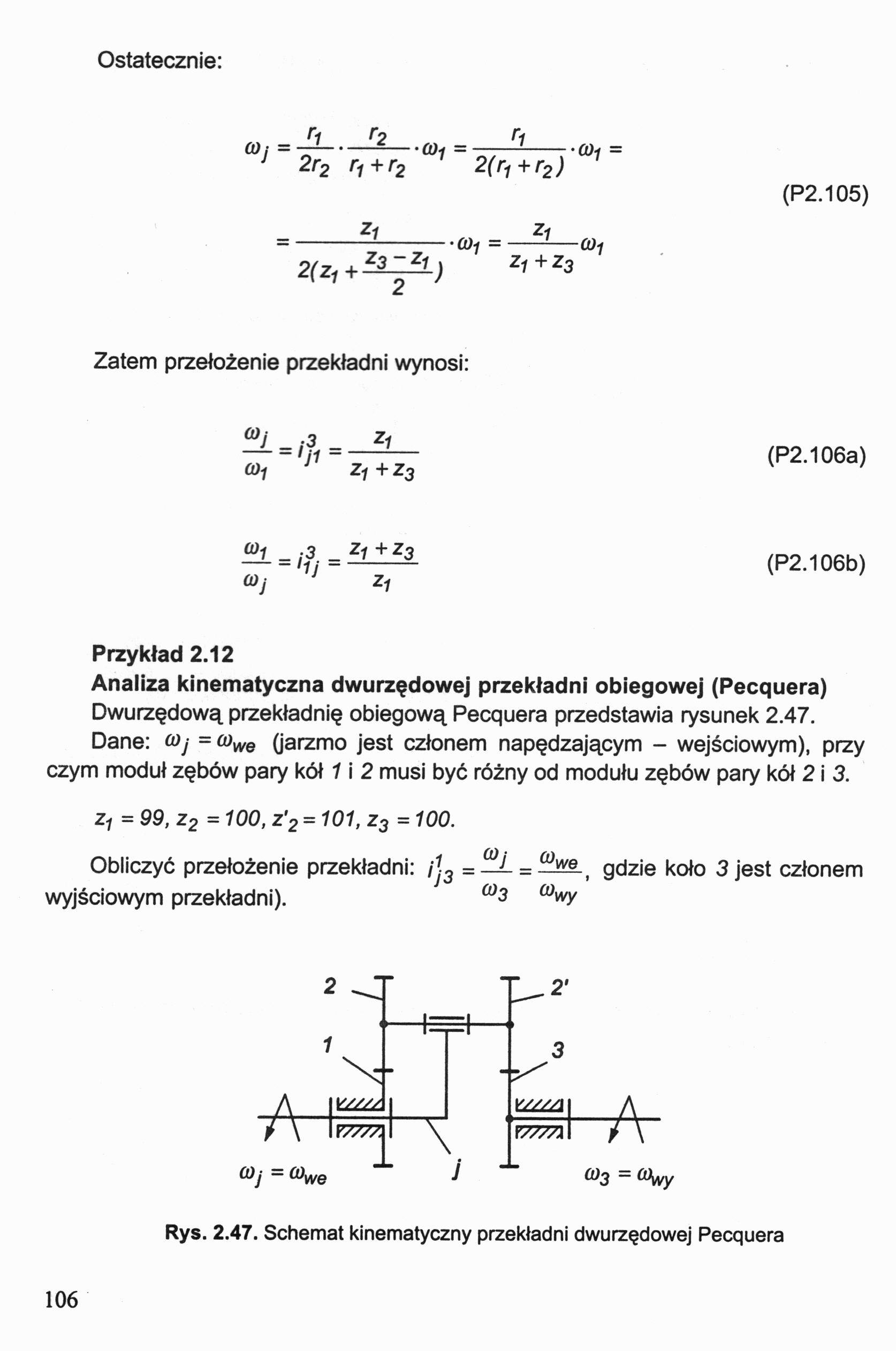
Przykład 2.12
Analiza kinematyczna dwurzędowej przekładni obiegowej (Pecquera)
Dwurzędową przekładnię obiegową Pecęuera przedstawia rysunek 2.47. Dane: (Oj =<»we Garzmo jest członem napędzającym - wejściowym), przy czym moduł zębów pary kół 1 i 2 musi być różny od modułu zębów pary kół 2 i 3.
z* = 99, z2 = 100, z'2 = 101, z3 = 100.
Obliczyć przełożenie przekładni: /j3 = gdzie koło 3 jest członem
wyjściowym przekładni). a>3 Wwy
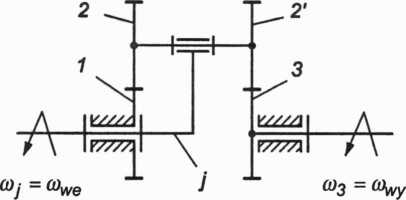
Rys. 2.47. Schemat kinematyczny przekładni dwurzędowej Pecguera
106
Wyszukiwarka
Podobne podstrony:
23 luty 07 (105) Ostatecznie przełożenie przekładni obiegowej wyniesiez3y Zj+z3 Zł) Z1 (P2.97) Przeł
23 luty 07 (91) ostatecznie d2l aB2B3 =—f = lie1sin((p1-<p3) + li(D?cos((p1-(p3) + l3a)§
23 luty 07 (145) kierunków sił (Pri) i (W). Kierunek reakcji (R01) określa prosta przechodząca przez
23 luty 07 * * AA>TEORIA MASZYN I $ Q19-2004 JOZEF FELIS, HUBERT JAWOROWSKI, JACEK CIEŚLIK * *CZE
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (102) koło bjest nieruchome, cob = 0, natomiast koło a i jarzmo są członami ruchomymi, ry
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (106) Znak (-) we wzorze (P2.102) oznacza, że zwrot prędkości kątowej satelity 2 jest prz
23 luty 07 (108) Rozwiązanie Przełożenie przekładni można zapisać /)3 = —. 3j Wykorzystamy wzór na
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
23 luty 07 (10) Ciało sztywne to układ punktów materialnych, w którym wzajemne odległości dwóch dowo
23 luty 07 (110) Schemat kompletnej przekładni różnicowej stożkowej oraz jej schemat bez przesztywni
23 luty 07 (111) Zróżnicowanie prędkości kół umożliwia przekładnia stożkowa złożona z kół 3, 4 i 5,
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
23 luty 07 (113) 3. DYNAMIKA MECHANIZMÓW I MASZYN3.1. CELI ZAKRESANALIZY DYNAMICZNEJ MECHANIZMÓW Dyn
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
więcej podobnych podstron