23 luty 07 (135)

Grafoanalityczna metoda wyznaczania reakcji dynamicznych w parach kinematycznych wybranych mechanizmów płaskich zawierających wyłącznie grupy ki. 2 przedstawiona zostanie na przykładach. We wszystkich przedstawionych poniżej przykładach człon 1 jest członem napędzającym i tarcie nie występuje. Sposób wyznaczania reakcji z uwzględnieniem tarcia przedstawiony zostanie w następnym podrozdziale.
Przykład 3.2
Mechanizm korbowo-suwakowy
Przeprowadzić analizę kinetostatyczną mechanizmu korbowo-suwakowego metodą grafoanalityczną w położeniu zadanym na rysunku 3.17. Wyznaczyć reakcje dynamiczne w parach kinematycznych oraz moment równoważący Mr1 przyłożony do korby 1. Tarcie w parach kinematycznych należy pominąć.
Dany jest: opis ruchu członu napędzającego w postaci funkcji: (p1t (o1t e1t długości członów: AB, BC, AS1t BS2, masy członów m1,m2,m3, momenty bezwładności członów względem środków mas: JSł,JS2 oraz siła oporu P3. Mechanizm pracuje w płaszczyźnie pionowej.
1 B 2
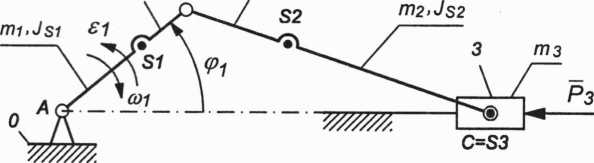
Rys. 3.17. Mechanizm korbowo-suwakowy
Rozwiązanie
Mechanizm składa się z członu napędzającego 1 oraz grupy strukturalnej (2, 3) klasy 2. Ruchliwość mechanizmu jest równa w = 1.
Warunek statycznej wyznaczalności mechanizmu określony równaniem (3.19) jest spełniony, ponieważ: 3-3 = 2-4 +1 = 9.
Przyśpieszenia liniowe środków mas: as1, aS2, a33 oraz przyśpieszenia kątowe członów e2 i e3 zostały wyznaczone na podstawie planu przyspieszeń przedstawionego na rysunku 3.3. Obliczamy siły bezwładności oraz momenty od sił bezwładności członów na podstawie wzorów (3.11) do (3.16) i przykładamy je do mechanizmu zgodnie z rysunkami 3.4, 3.5 oraz 3.6:
człon 1: B-, = -m-,as1, B1 = myaSł, MB1 = -JSJer, MB1 = JSfet;
człon 2: B2 = —m2aB2, B2 — m2aB2, MB2 = ~Js2^2< MB2 ~ ^S2^2’
człon 3: B3 = -m3aS3, B3 = m3aS3, MB3 = -JS30 = 0, MB3 = 0.
134
Wyszukiwarka
Podobne podstrony:
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
23 luty 07 (117) Siły wewnętrzne, czyli reakcje w parach kinematycznych, oznaczono symbolami, które
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
24 luty 07 (21) Przykład 3.13 Wyznaczyć reakcje rĄt w punkcie A oraz siłę P2 w warunkach tarcia śliz
24 luty 07 (29) Przykład 3.16 Wyznaczyć reakcje w parach kinematycznych mechanizmu krzywkowego i mom
23 luty 07 (120) Zgodnie z zasadą d Alemberta zagadnienia dynamiki zapisane równaniami (3.1) i (3.2)
23 luty 07 (60) Przykład 2.2 Mechanizm czworoboku przegubowego Wyznaczymy metodą planów prędkości i
23 luty 07 (71) Przykład 2.5 Mechanizm Oidhama Wyznaczymy metodą planów prędkość i przyspieszenie li
23 luty 07 (74) 71 a2.2.4. Metoda toru ocechowanego Metoda toru ocechowanego jest to metoda grafoana
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (124) Para kinematyczna klasy 5 obrotowa - przegub walcowy Jeżeli pominiemy tarcie, to ki
23 luty 07 (127) rysunki 3.11 b i c - dwa rozłączone człony z przyłożonymi siłami reakcji przesunięt
23 luty 07 (136) Wyznaczamy siły ciężkości: G? = m^g, G2 = m2g, G3 = m3g. Na mechanizm działa dodatk
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (145) kierunków sił (Pri) i (W). Kierunek reakcji (R01) określa prosta przechodząca przez
23 luty 07 (149) Uwalniając suwak od więzów (rys. 3.31) naieżałobyzatem przyłożyć normalne siły reak
23 luty 07 (39) Stosowane są również metody grafoanalityczne, które w zasadzie można zaliczyć do met
więcej podobnych podstron