24 luty 07 (29)
Przykład 3.16
Wyznaczyć reakcje w parach kinematycznych mechanizmu krzywkowego i moment równoważący Mj-, przyłożony do członu napędzającego z uwzględnieniem tarcia w parach kinematycznych.
Dane: wymiary mechanizmu, wartość i kierunek siły oporu P2, współczynnik tarcia //jednakowy dla wszystkich par kinematycznych, promień czopa wału krzywki r.
Rozwiązanie
Rozwiązanie przykładu jest podzielone na 3 etapy.
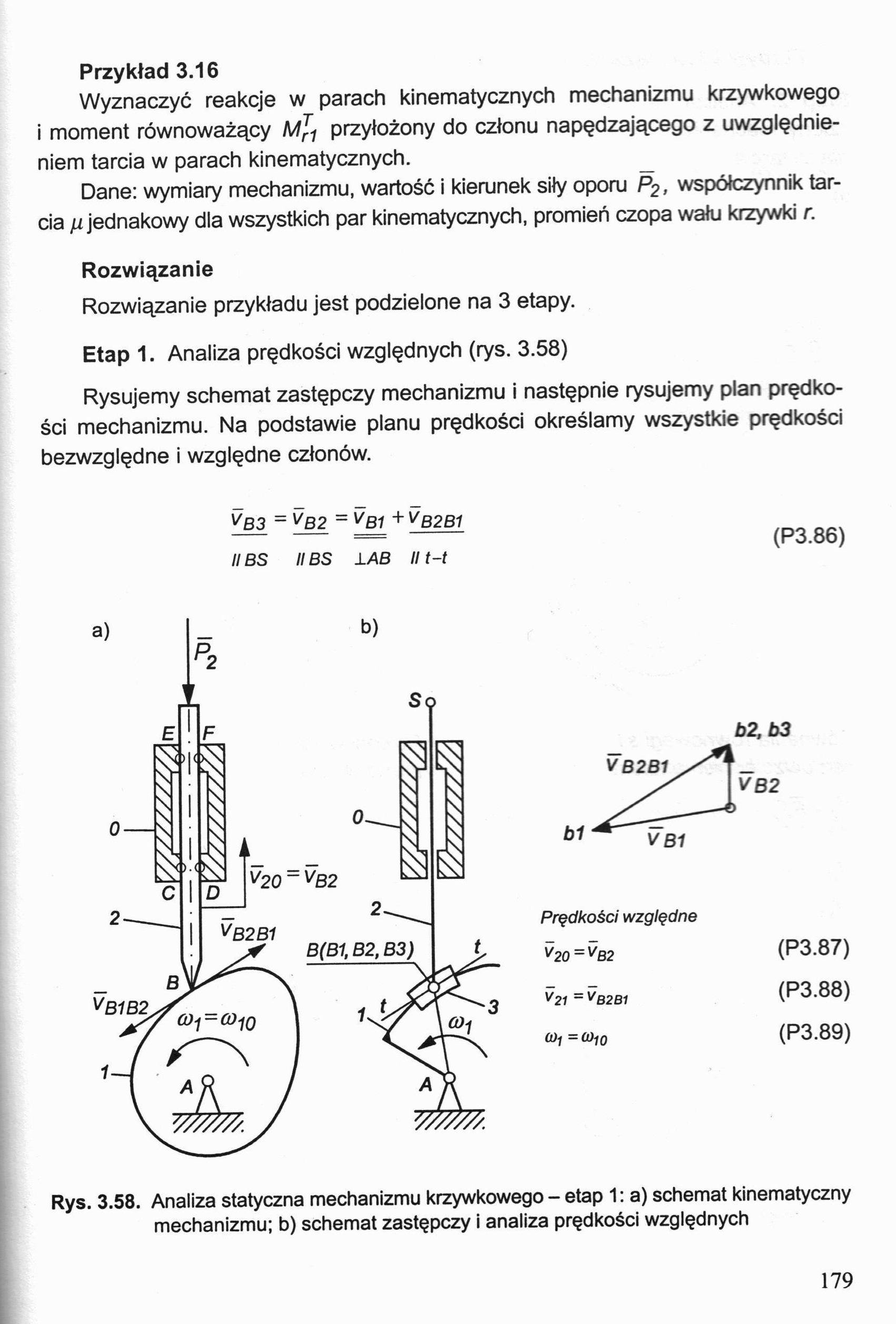
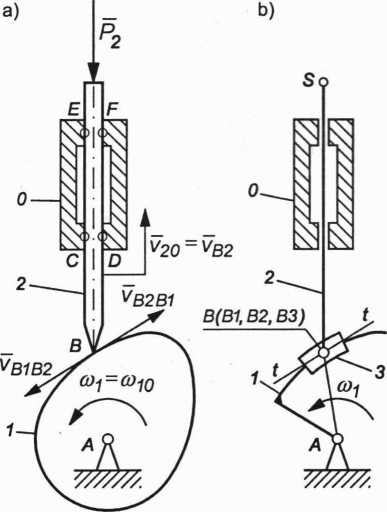
Etap 1. Analiza prędkości względnych (rys. 3.58)
Rysujemy schemat zastępczy mechanizmu i następnie rysujemy plan prędkości mechanizmu. Na podstawie planu prędkości określamy wszystkie prędkości bezwzględne i względne członów.
VB3 ~ VB2 = VB1 +VB2B1 IIBS IIBS XAB llt-t
(P3.86)
b2,b3

VB1
Prędkości względne
V20=vB2 (P3.87)
V21=VB2B1 (P3.88)
£Oj=wfo (P3.89)
Rys. 3.58. Analiza statyczna mechanizmu krzywkowego - etap 1: a) schemat kinematyczny mechanizmu; b) schemat zastępczy i analiza prędkości względnych
179
Wyszukiwarka
Podobne podstrony:
24 luty 07 (21) Przykład 3.13 Wyznaczyć reakcje rĄt w punkcie A oraz siłę P2 w warunkach tarcia śliz
23 luty 07 (117) Siły wewnętrzne, czyli reakcje w parach kinematycznych, oznaczono symbolami, które
23 luty 07 (23) Przykład 1.4 n = 2 p4= 1, ps = 2, iv= 1 Rys. 1.14. Mechanizm krzywkowy z popychaczem
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
23 luty 07 (135) Grafoanalityczna metoda wyznaczania reakcji dynamicznych w parach kinematycznych wy
23 luty 07 (29) 1.2.1.2. Przykłady zastępowania par klasy 4 parami klasy 5 Przykład 1.9 (rys. 1.20)
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (124) Przykładowe charakterystyki Mc(ę) i Mb((p) pokazano na rysunku 3.121. Rys. 3.121. P
24 luty 07 (58) Przykład 3.20 Dany jest wirnik o masie M obracający się wokół osi Oz z prędkością ką
24 luty 07 (72) Przykład 3.24 Rozmieścić przeciwciężary celem wyrównoważenia całkowitego i częściowe
24 luty 07 (85) Przykład 3.26 Obliczyć dla mechanizmu jarzmowego przedstawionego na rysunku 3.97 sił
24 luty 07 (131) Analiza wzoru (P3.275) wykazuje, że na wartość momentu bezwładności koła zamachoweg
24 luty 07 (156) 4.2. PROGRAM SAM- Simulation and Analysis of Mechanisms Program SAM [17] przeznaczo
24 luty 07 (26) Etap 2. Analiza sił działających na człony mechanizmu bez uwzględnienia tarcia Zadan
24 luty 07 (27) Etap 3. Analiza sił działających na człony mechanizmu z uwzględnieniem sił tarcia Pr
24 luty 07 (77) Na rysunku 3.94 przedstawiono łańcuch kinematyczny dowolnego złożonego mechanizmu pł
24 luty 07 (16) Rys. 3.43. Stożek tarcia pary kinematycznej Rkt = -R,k - całkowita reakcja w parze p
23 luty 07 (60) Przykład 2.2 Mechanizm czworoboku przegubowego Wyznaczymy metodą planów prędkości i
więcej podobnych podstron