24 luty 07 (156)
4.2. PROGRAM SAM
- Simulation and Analysis of Mechanisms
Program SAM [17] przeznaczony jest do analizy mechanizmów płaskich. Umożliwia modelowanie płaskich mechanizmów dźwigniowych poprzez łączenie pojedynczych członów typu: dźwignia, suwak oraz modelowanie przekładni kołowych i cięgnowych. Ponadto daje możliwości modelowania elementów typu: sprężyna, tłumik, czujnik, element cierny. Struktury modelowane w programie SAM mogą mieć ruchliwość w> 1. Realizacja napędu możliwa jest w postaci kąta obrotu lub przemieszczenia liniowego.
Analiza w programie SAM obejmuje:
- symulacje ruchu mechanizmu,
- analizę przemieszczeń, prędkości, przyspieszeń,
- analizę sił w parach kinematycznych - analizę kinetostatyczną.
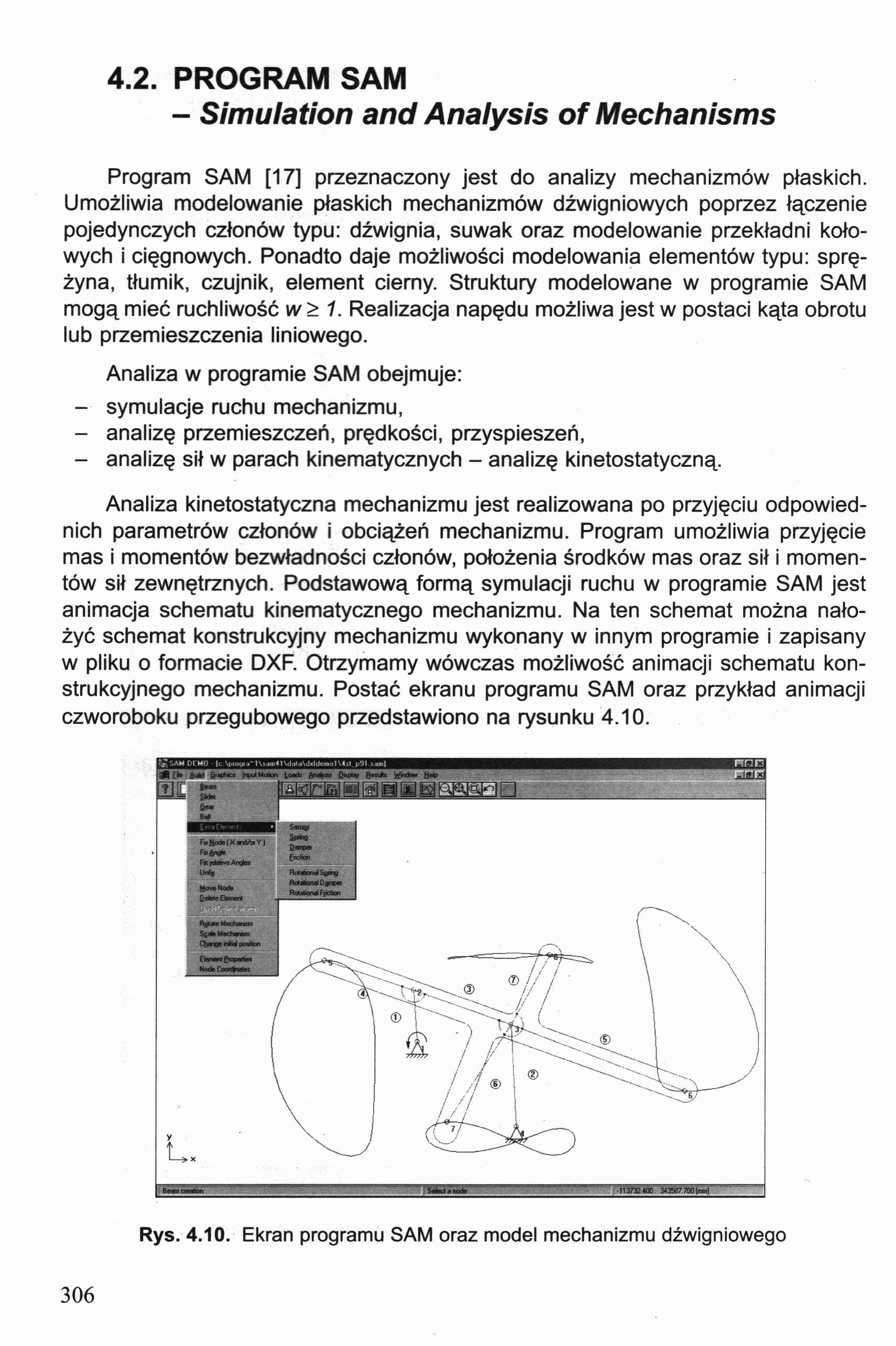
Analiza kinetostatyczna mechanizmu jest realizowana po przyjęciu odpowiednich parametrów członów i obciążeń mechanizmu. Program umożliwia przyjęcie mas i momentów bezwładności członów, położenia środków mas oraz sił i momentów sił zewnętrznych. Podstawową formą symulacji ruchu w programie SAM jest animacja schematu kinematycznego mechanizmu. Na ten schemat można nałożyć schemat konstrukcyjny mechanizmu wykonany w innym programie i zapisany w pliku o formacie DXF. Otrzymamy wówczas możliwość animacji schematu konstrukcyjnego mechanizmu. Postać ekranu programu SAM oraz przykład animacji czworoboku przegubowego przedstawiono na rysunku 4.10.
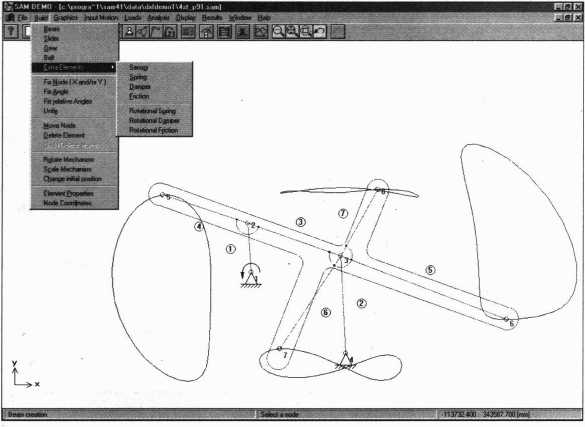
Rys. 4.10. Ekran programu SAM oraz model mechanizmu dźwigniowego
306
Wyszukiwarka
Podobne podstrony:
24 luty 07 (153) W programie AKM można modelować grupę strukturalną w ten sposób, że będzie mieć pun
24 luty 07 (157) 4.3. PROGRAM WORKING MODEL Program Working Model [19], dostępny obecnie w wersji 2D
24 luty 07 (158) 4.4. PROGRAM WATT W odróżnieniu programów prezentowanych wcześniej, program Watt je
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
24 luty 07 (29) Przykład 3.16 Wyznaczyć reakcje w parach kinematycznych mechanizmu krzywkowego i mom
24 luty 07 (75) Zatem przejście od rzeczywistego obiektu (maszyny), czyli układu o nieskończonej lic
24 luty 07 (82) 3.7.4. Redukcja sił i momentów sił Moc chwilowa siły zredukowanej (momentu zredukowa
24 luty 07 (84) Natomiast, jeśli otrzymamy Pzr(0 lub Mzr(0, to oznacza, że siła zredukowana jest sił
image154 f^WwIrak 1 1 VK<J*n PO"WWiatrak 11 Program “Wiatrak 1.1 “ przeznaczony jest do obli
24 luty 07 (133) Do obliczeń można wykorzystać programy matematyczne np. program MATLAB lub arkusz k
24 luty 07 (148) 4.1.1. Zasady modelowania mechanizmów w programie AKMBudowa mechanizmów dźwigniowyc
24 luty 07 (150) 4.1.2. Cechy geometryczne mechanizmów w programie AKM W celu przeprowadzenia analiz
24 luty 07 (155) Rys. 4.8. Modelowanie i analiza kinematyczna mechanizmu złożonego o strukturze szer
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (101) Drugą część zlinearyzowanej charakterystyki przedstawia odcinek BS prostej przechod
24 luty 07 (102) Etap 2 Rozruch układu bez obciążenia, Mb = 0, przy malejącym liniowo momencie napęd
24 luty 07 (103) Po czasie t2 = 3T prędkość kątowa osiąga 95% wartości ustalonej coust w drugim etap
24 luty 07 (104) Prędkość kątową a>p w ruchu ustalonym podczas przecinania znajdziemy z zależnośc
więcej podobnych podstron