24 luty 07 (131)
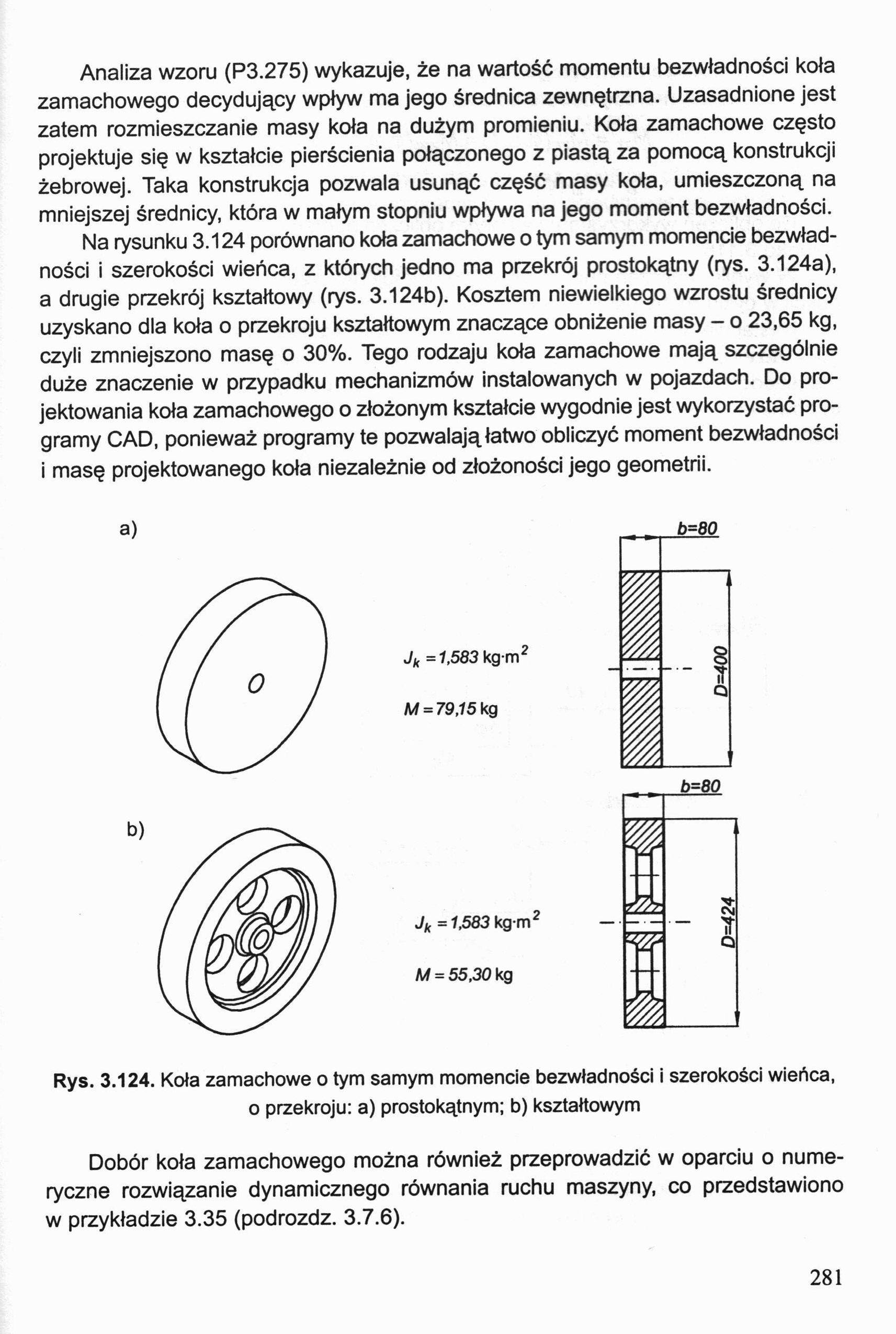
Analiza wzoru (P3.275) wykazuje, że na wartość momentu bezwładności koła zamachowego decydujący wpływ ma jego średnica zewnętrzna. Uzasadnione jest zatem rozmieszczanie masy koła na dużym promieniu. Koła zamachowe często projektuje się w kształcie pierścienia połączonego z piastą za pomocą konstrukcji żebrowej. Taka konstrukcja pozwala usunąć część masy koła, umieszczoną na mniejszej średnicy, która w małym stopniu wpływa na jego moment bezwładności.
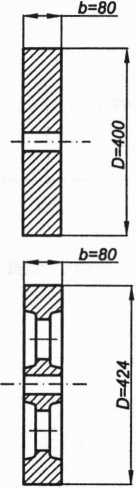
Na rysunku 3.124 porównano koła zamachowe o tym samym momencie bezwładności i szerokości wieńca, z których jedno ma przekrój prostokątny (rys. 3.124a), a drugie przekrój kształtowy (rys. 3.124b). Kosztem niewielkiego wzrostu średnicy uzyskano dla koła o przekroju kształtowym znaczące obniżenie masy - o 23,65 kg, czyli zmniejszono masę o 30%. Tego rodzaju koła zamachowe mają szczególnie duże znaczenie w przypadku mechanizmów instalowanych w pojazdach. Do projektowania koła zamachowego o złożonym kształcie wygodnie jest wykorzystać programy CAD, ponieważ programy te pozwalają łatwo obliczyć moment bezwładności i masę projektowanego koła niezależnie od złożoności jego geometrii.
a)


Rys. 3.124. Koła zamachowe o tym samym momencie bezwładności i szerokości wieńca, o przekroju: a) prostokątnym: b) kształtowym
Dobór koła zamachowego można również przeprowadzić w oparciu o numeryczne rozwiązanie dynamicznego równania ruchu maszyny, co przedstawiono w przykładzie 3.35 (podrozdz. 3.7.6).
281
Wyszukiwarka
Podobne podstrony:
24 luty 07 (141) Rozwiązując równanie (P3.287) dla zadanych warunków początkowych, mamy: -
24 luty 07 (14) 3.4. ANALIZA SIŁ W PARACH KINEMATYCZNYCH Z UWZGLĘDNIENIEM TARCIA Podczas ślizgowego
24 luty 07 (5) Przykład 3.8 Analiza statyczna metodą Culmana grupy strukturalnej suwak-dźwignia Grup
24 luty 07 (61) Z czwartego równania (P3.128) mamy mk2 -m1r1sin(p1-2m2r2sin(p2 =1583g 3rk2 sinęk2 (P
24 luty 07 (10) W etapie pierwszym rozkładamy znaną siłę P2 na siły Rq2 oraz CNM zgodnie z równaniem
24 luty 07 (29) Przykład 3.16 Wyznaczyć reakcje w parach kinematycznych mechanizmu krzywkowego i mom
24 luty 07 (57) Ścisłe spełnienie warunków wyrównoważenia dynamicznego wirnika na etapie konstruowan
24 luty 07 (25) Etap 3. Analiza statyczna z uwzględnieniem tarcia 1M(C)=0, M3-RT03-dT3 =0 (P3.73)
24 luty 07 (107) Wyznaczenie pozostałych zależności (P3.204) D cos = m1; (Oj = cob; vA = rjcoj; vB =
24 luty 07 (109) Etap 6 Całkowanie dynamicznego równania ruchu a-j -bu>i = J2 dco1 ~df (P3.219) (
24 luty 07 (110) Obliczenie przyśpieszenia kątowego wału silnika (es(t) = e-i(t)) £t = ~~e T Jzrs (P
24 luty 07 (130) stądJkp ~ J* a> zr CO r 4k zr,i (P3.274) Ponieważ wał pośredni obraca się zwykle
24 luty 07 (132) Dobór koła zamachowego na podstawie równania różnicowego (P3.264) Rozważaną metodę
24 luty 07 (137) M. =a-bo) Ns =(a-bw )a N -a- 40 Rys. 3.131. Charakterystyka silnika o momencie lini
24 luty 07 (147) 4. KOMPUTEROWE MODELOWANIE I ANALIZA MECHANIZMÓW Rozwiązywanie zagadnień analizy me
24 luty 07 (150) 4.1.2. Cechy geometryczne mechanizmów w programie AKM W celu przeprowadzenia analiz
24 luty 07 (155) Rys. 4.8. Modelowanie i analiza kinematyczna mechanizmu złożonego o strukturze szer
24 luty 07 (156) 4.2. PROGRAM SAM- Simulation and Analysis of Mechanisms Program SAM [17] przeznaczo
24 luty 07 (20) Rys. 3.48. Analiza wykreślna warunku równowagi granicznej członu podpartego na podpo
więcej podobnych podstron