23 luty 07 (84)
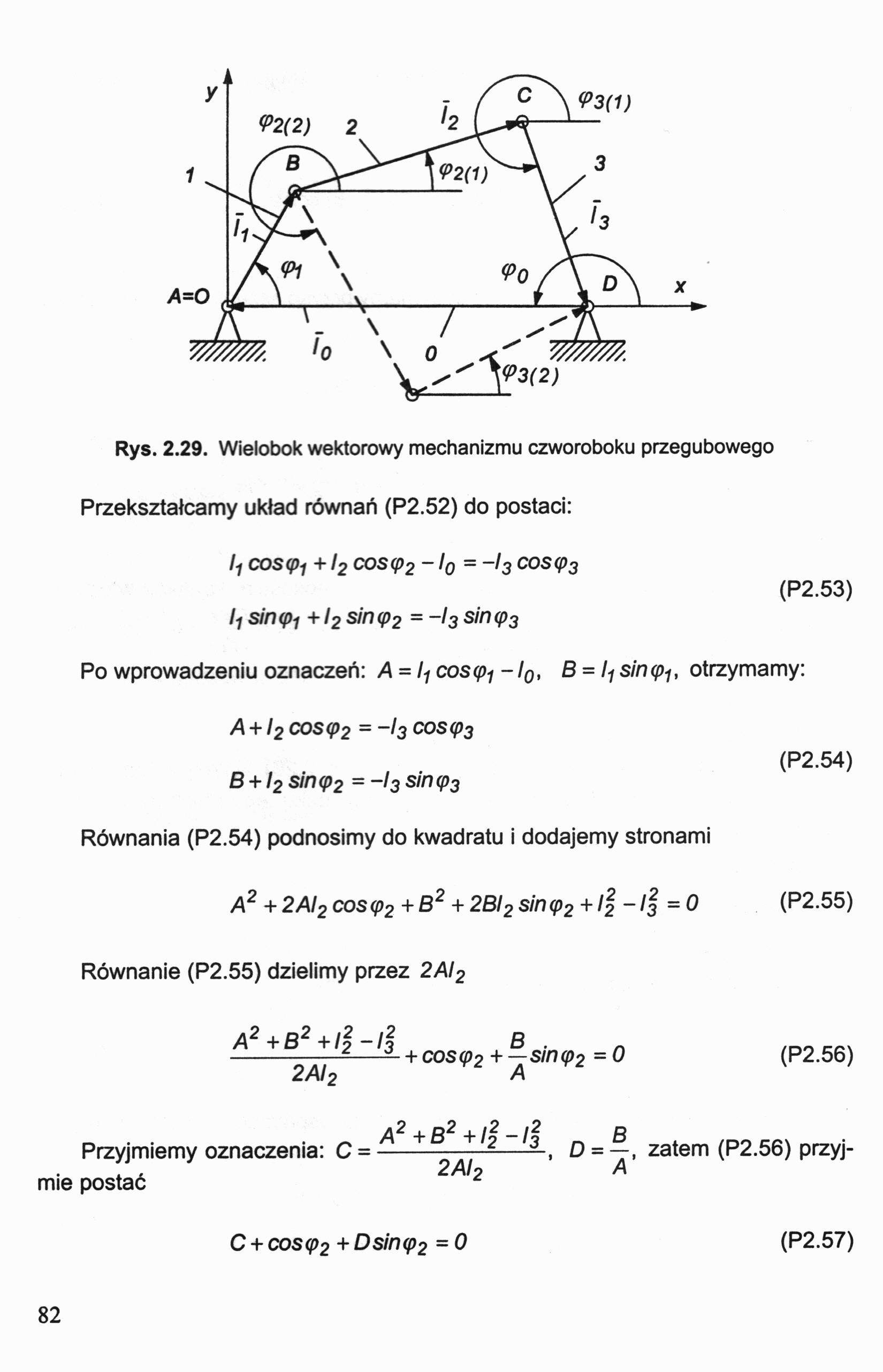
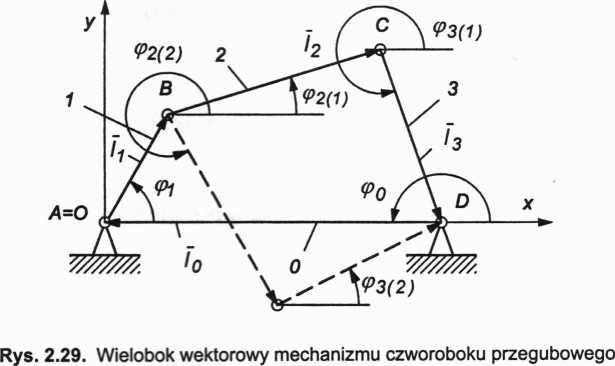
Przekształcamy układ równań (P2.52) do postaci:
If coscpi +l2 cos(p2 -10 = -l3 cosę3
(P2.53)
l1 sinę-f + l2sinę2 = -l3 sin ę3
Po wprowadzeniu oznaczeń: A = l-j coscpi-l0, B = If sin<p7, otrzymamy:
(P2.54)
A + l2 cosę2 = -l3 cosę3 B + l2 sin <P2 -_l 3 s'n <P3
Równania (P2.54) podnosimy do kwadratu i dodajemy stronami
A2 + 2AI2 cos(p2 +B2 + 2BI2 sincp2 +l2 - /f =0 (P2.55)
Równanie (P2.55) dzielimy przez 2AI2
A2 + B2 +12 -13 B .
--—*- + cos(p2 + —sm(p2 = 0
2 Al 2 A
. . A2 + B2 +12 -13 _ B
Przyjmiemy oznaczenia: C =____ ——, D = —,
mie postać
2Ah
A
C + cos(p2 + Dsinę2 = 0
(P2.56) zatem (P2.56) przyj-(P2.57)
82
Wyszukiwarka
Podobne podstrony:
23 luty 07 (106) Znak (-) we wzorze (P2.102) oznacza, że zwrot prędkości kątowej satelity 2 jest prz
23 luty 07 (131) Dwa pierwsze równania (3.21) przedstawiają sumy współrzędnych wszystkich sił działa
23 luty 07 (137) Zapisujemy wektorowe równania równowagi sił działających na człony 2 i 3: dla człon
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (57) Następnie piszemy równanie prędkości punktu C, traktując ruch łącznika 2 jako ruch z
23 luty 07 (65) Następnie zapisujemy równanie prędkości punktu S2, który znajduje się na członie 2 s
23 luty 07 (73) Następnie zapisujemy równanie przyspieszenia punktu B2, który znajduje się na członi
23 luty 07 (82) Przyjmując oznaczenie A = — mamy z (P2.41) mamy h sirup2 = ~—sinę1 = -Xsinę1 12 i st
23 luty 07 (8) WSTĘP Teoria maszyn i mechanizmów (TMM) należy do dyscypliny mechanika i obejmuje pro
23 luty 07 (72) Rozwiązując wykreślnie układ równań (P2.34) i (P2.35), znajdujemy punkt przecięcia k
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (61) Prędkość punktu K znajdziemy na podstawie układu równań (P2.13), porównując ich praw
23 luty 07 (86) W celu obliczenia przyspieszeń kątowych różniczkujemy równanie (P2.60) cofli cos(pi
23 luty 07 (90) W celu znalezienia prędkości kątowych i liniowych jarzma 3 różniczkujemy pierwsze z
23 luty 07 (105) Ostatecznie przełożenie przekładni obiegowej wyniesiez3y Zj+z3 Zł) Z1 (P2.97) Przeł
23 luty 07 (10) Ciało sztywne to układ punktów materialnych, w którym wzajemne odległości dwóch dowo
23 luty 07 (119) W równaniach (3.1) i (3.2) przyjęto oznaczenia: Pi - wektor główny sił zewnętrznych
23 luty 07 (120) Zgodnie z zasadą d Alemberta zagadnienia dynamiki zapisane równaniami (3.1) i (3.2)
więcej podobnych podstron