23 luty 07 (140)
Przykład 3.3
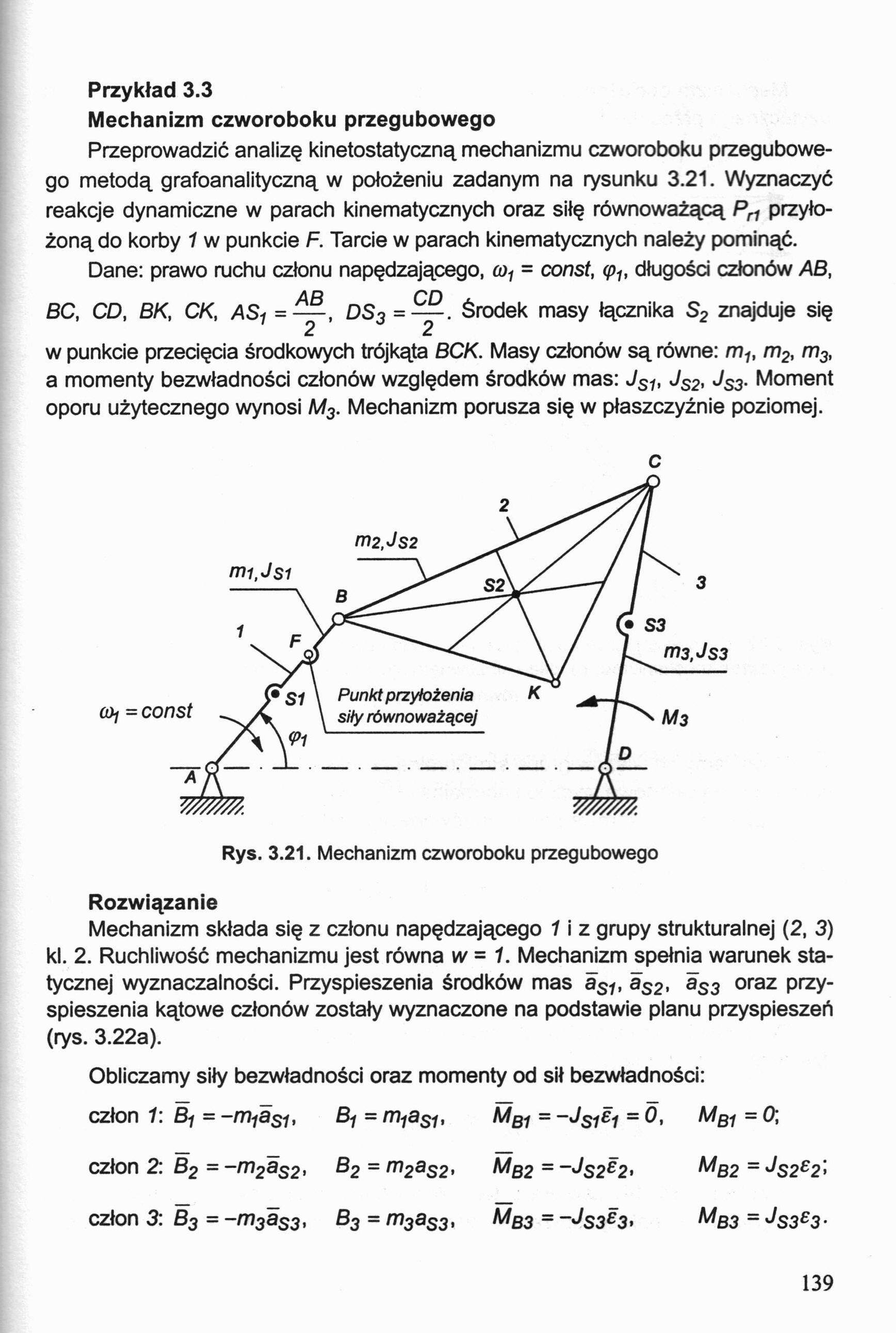
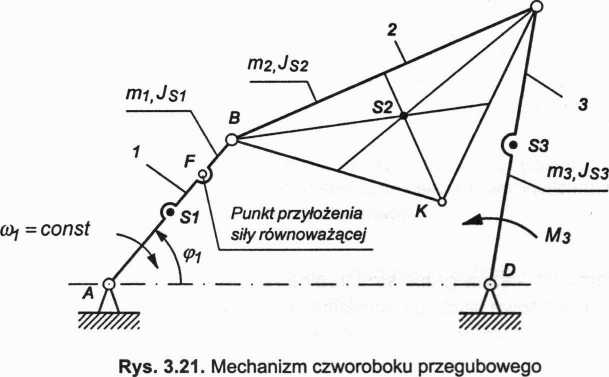
Mechanizm czworoboku przegubowego
Przeprowadzić analizę kinetostatyczną mechanizmu czworoboku przegubowego metodą grafoanalityczną w położeniu zadanym na rysunku 3.21. Wyznaczyć reakcje dynamiczne w parach kinematycznych oraz siłę równoważącą Pr1 przyłożoną do korby 1 w punkcie F. Tarcie w parach kinematycznych należy pominąć. Dane: prawo ruchu członu napędzającego, o)1 = const, ę1t długości członów AB, AR CD
BC, CD, BK, CK, AS-, = —, DS3=—. Środek masy łącznika S2 znajduje się
w punkcie przecięcia środkowych trójkąta BCK. Masy członów są równe: m1t m2, m3, a momenty bezwładności członów względem środków mas: JS1, JS2, JS3. Moment oporu użytecznego wynosi M3. Mechanizm porusza się w płaszczyźnie poziomej.
C
Rozwiązanie
Mechanizm składa się z członu napędzającego 1 i z grupy strukturalnej (2, 3) kl. 2. Ruchliwość mechanizmu jest równa w = 1. Mechanizm spełnia warunek statycznej wyznaczalności. Przyspieszenia środków mas as1, aS2, aS3 oraz przyspieszenia kątowe członów zostały wyznaczone na podstawie planu przyspieszeń (rys. 3.22a).
Obliczamy siły bezwładności oraz momenty od sił bezwładności: człon 1: B-j = -mia$i, Bf = m-ja3f, Mgf = -Jsi&i = 0, = 0;
człon 2: B2 =-m2a32, B2 = m2a32, Mq2 = ~Js2^2< ^B2 =^S2e2<
człon 3: B3 = -m3as3, B3 = m3aS3, MB3 = -Js3^3< mB3 = JS3e3-
139
Wyszukiwarka
Podobne podstrony:
23 luty 07 (60) Przykład 2.2 Mechanizm czworoboku przegubowego Wyznaczymy metodą planów prędkości i
23 luty 07 (71) Przykład 2.5 Mechanizm Oidhama Wyznaczymy metodą planów prędkość i przyspieszenie li
23 luty 07 (21) Przykład 1.1 n = 3p1 = 0,p2 = 0, p3= 1, p4=1, ps=2 Rys. 1.11. Przestrzenny czworobok
23 luty 07 (22) 1.1.6.3. Przykłady obliczania ruchliwości mechanizmów płaskich Obliczenie ruchliwośc
23 luty 07 (25) Przykład 1.7 (rys. 1.17)Ruchliwość teoretyczna wt = 3n - 2p5 - p4 = 0. Mechanizm ma
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
23 luty 07 (113) 3. DYNAMIKA MECHANIZMÓW I MASZYN3.1. CELI ZAKRESANALIZY DYNAMICZNEJ MECHANIZMÓW Dyn
23 luty 07 (130) Jeżeli w mechanizmie zastąpimy pary kinematyczne ki. 4 parami ki. 5, to równanie (3
23 luty 07 (20) 1.1.6. Ruchliwość mechanizmu Liczba stopni swobody względem nieruchomej podstawy, kt
23 luty 07 (26) 1.2. KLASYFIKACJA MECHANIZMÓW1.2.1. Zasady klasyfikacji strukturalnej mechanizmów pł
23 luty 07 (29) 1.2.1.2. Przykłady zastępowania par klasy 4 parami klasy 5 Przykład 1.9 (rys. 1.20)
23 luty 07 (33) 1.2.1.4. Przykłady klasyfikacji strukturalnej Przykład 1.12 (rys. 1.23) Grupa strukt
23 luty 07 (34) Przykład 1.14 (rys. 1.25) Grupa strukturalna n = 2,ps = 3, wgr = O Grupa strukturaln
24 luty 07 (40) Rozwiązanie W pierwszym etapie rozwiązania przeprowadzamy analizę statyczną mechaniz
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (151) 1 1 R0i - O Rys. 3.33. Człon napędzający mechanizmu Oldhama oswobodzony od więzów P
23 luty 07 (23) Przykład 1.4 n = 2 p4= 1, ps = 2, iv= 1 Rys. 1.14. Mechanizm krzywkowy z popychaczem
23 luty 07 (6) 3.4.4. Przykłady rozwiązywania problemów z tarciem w mechanizmach p
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
więcej podobnych podstron