23 luty 07 (21)
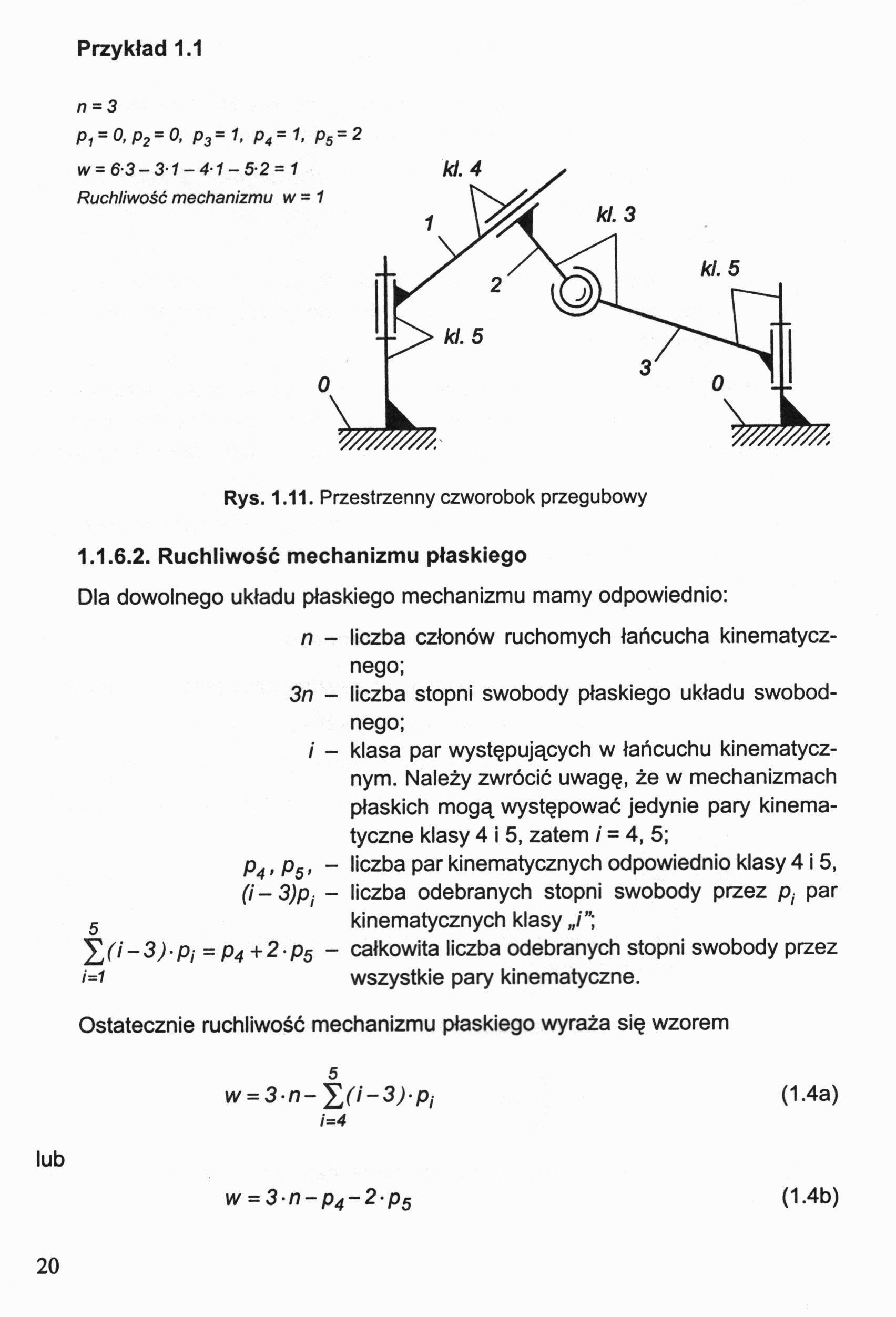
Przykład 1.1 n = 3
p1 = 0,p2 = 0, p3= 1, p4=1, ps=2
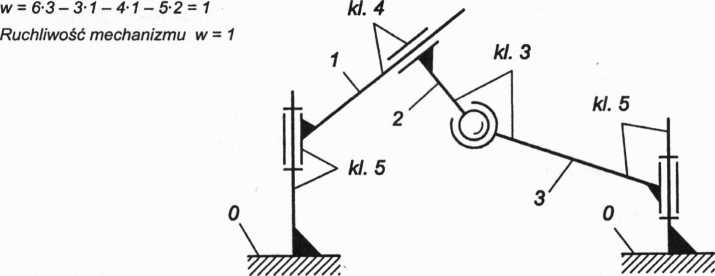
Rys. 1.11. Przestrzenny czworobok przegubowy
Dla dowolnego układu płaskiego mechanizmu mamy odpowiednio:
n
3n
i
liczba członów ruchomych łańcucha kinematycznego;
liczba stopni swobody płaskiego układu swobodnego;
klasa par występujących w łańcuchu kinematycznym. Należy zwrócić uwagę, że w mechanizmach płaskich mogą występować jedynie pary kinematyczne klasy 4 i 5, zatem / = 4, 5; liczba par kinematycznych odpowiednio klasy 4 i 5, liczba odebranych stopni swobody przez p, par kinematycznych klasy „/”;
całkowita liczba odebranych stopni swobody przez wszystkie pary kinematyczne.
Ostatecznie ruchliwość mechanizmu płaskiego wyraża się wzorem
w = 3-n-JJ(i-3)-pj
i=4 lub
w = 3-n-p4-2p5
(1 -4a)
(1.4b)
20
Wyszukiwarka
Podobne podstrony:
24 luty 07 (21) Przykład 3.13 Wyznaczyć reakcje rĄt w punkcie A oraz siłę P2 w warunkach tarcia śliz
23 luty 07 (140) Przykład 3.3 Mechanizm czworoboku przegubowego Przeprowadzić analizę kinetostatyczn
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (22) 1.1.6.3. Przykłady obliczania ruchliwości mechanizmów płaskich Obliczenie ruchliwośc
23 luty 07 (25) Przykład 1.7 (rys. 1.17)Ruchliwość teoretyczna wt = 3n - 2p5 - p4 = 0. Mechanizm ma
23 luty 07 (29) 1.2.1.2. Przykłady zastępowania par klasy 4 parami klasy 5 Przykład 1.9 (rys. 1.20)
23 luty 07 (33) 1.2.1.4. Przykłady klasyfikacji strukturalnej Przykład 1.12 (rys. 1.23) Grupa strukt
23 luty 07 (34) Przykład 1.14 (rys. 1.25) Grupa strukturalna n = 2,ps = 3, wgr = O Grupa strukturaln
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
23 luty 07 (60) Przykład 2.2 Mechanizm czworoboku przegubowego Wyznaczymy metodą planów prędkości i
23 luty 07 (71) Przykład 2.5 Mechanizm Oidhama Wyznaczymy metodą planów prędkość i przyspieszenie li
23 luty 07 (150) Uwalniamy teraz od więzów grupę strukturalną (2, 3) (rys. 3.32a). a) / b) 3 C *03 R
23 luty 07 (46) VCB Składanie prędkości unoszenia i prędkości względnej Rys. 2.7. Wyznaczanie przewo
PI P2 P3 P4 PS L5 l_4 L3 L2 LI sol mi mi fa re re do mi sol sol mi mi fa re re do mi do CD X X ) C
23 luty 07 (92) Etap 2 Analiza mechanizmu korbowo-suwakowego opisanego wielobokiem wektorowym (P2.92
23 luty 07 (105) Ostatecznie przełożenie przekładni obiegowej wyniesiez3y Zj+z3 Zł) Z1 (P2.97) Przeł
23 luty 07 (106) Znak (-) we wzorze (P2.102) oznacza, że zwrot prędkości kątowej satelity 2 jest prz
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
więcej podobnych podstron