24 luty 07 (36)
Całkowitą moc traconą w mechanizmie wyznaczamy, sumując moce tracone w jego wszystkich parach kinematycznych
n
k
NT = lNTpi + YjNToj
(3.57)
i=1 j=l
gdzie:
n - liczba par kinematycznych postępowych,
k - liczba par kinematycznych obrotowych.
Obliczoną moc NT wstawiamy do wzoru (3.51 a), wyznaczając analitycznie sprawność mechanizmu.
Przykład 3.17
Sprawność ślizgowej pary kinematycznej
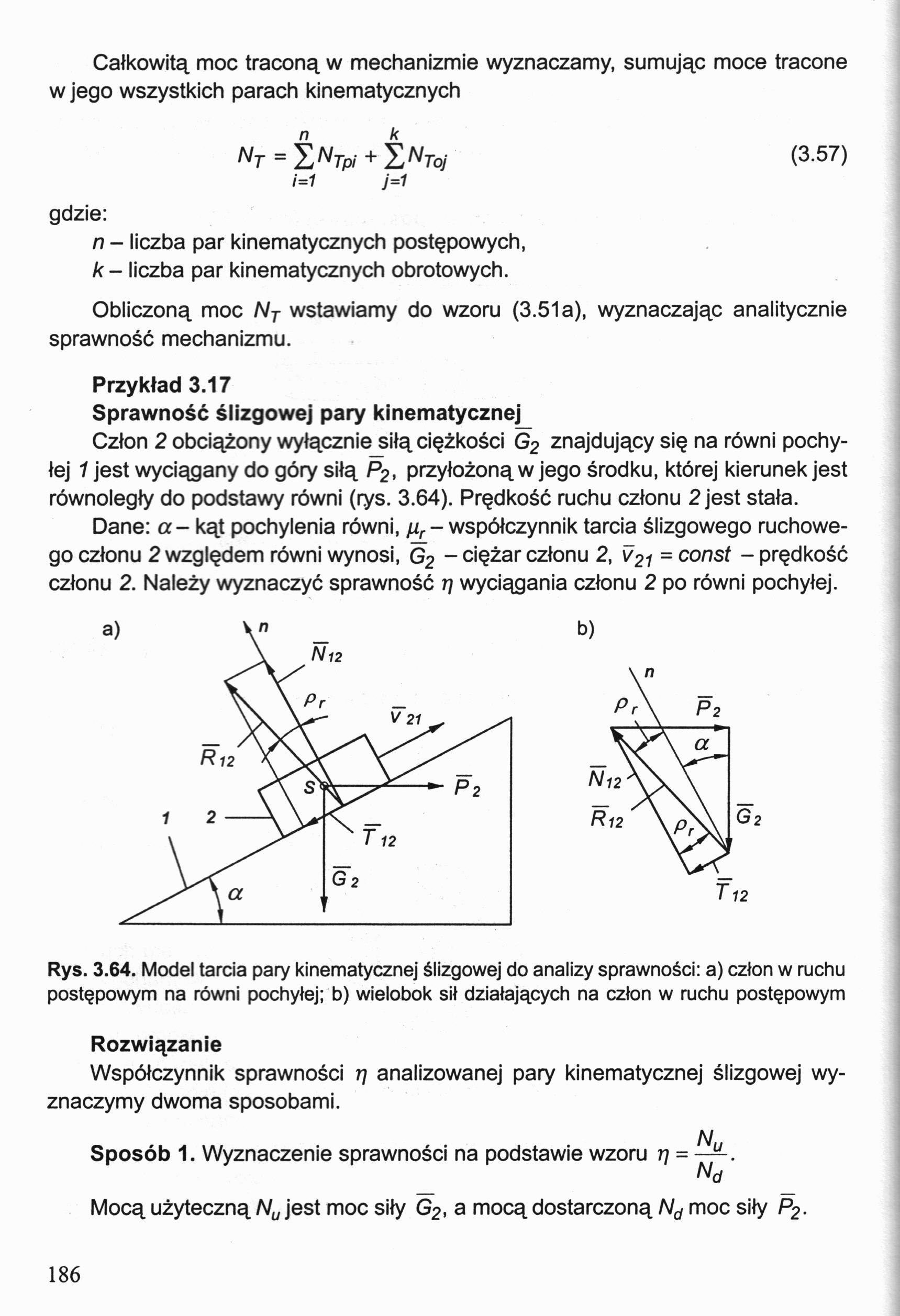
Człon 2 obciążony wyłącznie siłą ciężkości G2 znajdujący się na równi pochyłej 1 jest wyciągany do góry siłą P2, przyłożoną w jego środku, której kierunek jest równoległy do podstawy równi (rys. 3.64). Prędkość ruchu członu 2 jest stała.
Dane: a- kąt pochylenia równi, nr- współczynnik tarcia ślizgowego ruchowego członu 2 względem równi wynosi, G2 - ciężar członu 2, v21 = const - prędkość członu 2. Należy wyznaczyć sprawność rj wyciągania członu 2 po równi pochyłej.
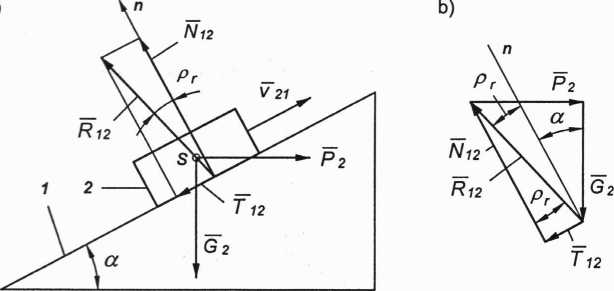
Rys. 3.64. Model tarcia pary kinematycznej ślizgowej do analizy sprawności: a) człon w ruchu postępowym na równi pochyłej: b) wielobok sił działających na człon w ruchu postępowym
a)
Rozwiązanie
Współczynnik sprawności t) analizowanej pary kinematycznej ślizgowej wyznaczymy dwoma sposobami.
N
Sposób 1. Wyznaczenie sprawności na podstawie wzoru r] = —.
Nd
Mocą użyteczną Nu jest moc siły G2, a mocą dostarczoną Nd moc siły P2.
186
Wyszukiwarka
Podobne podstrony:
23 luty 07 (36) Tabela 1.2 Klasyfikacja funkcjonalna mechanizmów Rodzaj łańcucha
24 luty 07 (147) 4. KOMPUTEROWE MODELOWANIE I ANALIZA MECHANIZMÓW Rozwiązywanie zagadnień analizy me
24 luty 07 (149) Podstawowymi składnikami budowy mechanizmów prostych i złożonych są grupy struktura
24 luty 07 (159) Literatura [1] Artobolewskij I.I.: Tieorija mechanizmov i maszin.
24 luty 07 (64) 3.6.4. Wyrównoważanie statyczne płaskich mechanizmów dźwigniowych W wielu przypadkac
24 luty 07 (65) W trakcie ruchu niewyrównoważonego mechanizmu środek masy porusza się po torze o wsp
24 luty 07 (9) Rys. 3.41. Analiza siłowa mechanizmu krzywkowego: a) mechanizm krzywkowy z popycha-cz
24 luty 07 (34) Moc sił tarcia w mechanizmach zależy od wielu parametrów konstrukcyjnych, kinematycz
24 luty 07 (72) Przykład 3.24 Rozmieścić przeciwciężary celem wyrównoważenia całkowitego i częściowe
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (108) Uwaga. Ponieważ całkowite przełożenie może być dodatnie lub ujemne w równaniu na Mz
24 luty 07 (109) Etap 6 Całkowanie dynamicznego równania ruchu a-j -bu>i = J2 dco1 ~df (P3.219) (
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
24 luty 07 (123) gdzie: Jzr - całkowity zredukowany moment bezwładności układu napędowego z kołem za
24 luty 07 (12) Zasada mocy chwilowych. Jeżeli mechanizm złożony z członów sztywnych połączonych ze
24 luty 07 (135) Własności mechaniczne zespołów układu napędowego opisują tzw. charakterystyki mecha
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
24 luty 07 (148) 4.1.1. Zasady modelowania mechanizmów w programie AKMBudowa mechanizmów dźwigniowyc
24 luty 07 (150) 4.1.2. Cechy geometryczne mechanizmów w programie AKM W celu przeprowadzenia analiz
więcej podobnych podstron