24 luty 07 (65)
W trakcie ruchu niewyrównoważonego mechanizmu środek masy porusza się po torze o współrzędnych:
n n
2>/*/ 5>/y/
Xs=mm~: Vs-Mnr<3'86)
Warunek statycznego wyrównoważenia mechanizmu płaskiego ma postać
B = -M -as-0 (3.87)
Dla M * 0 przyspieszenie a§ = 0, jeżeli:
a) środek masy mechanizmu porusza się ruchem jednostajnym prostoliniowym.
b) środek masy mechanizmu jest nieruchomy.
W mechanizmach dźwigniowych wykonujących ruch okresowy możliwy jest jedynie przypadek b), tzn.:
xs = const oraz ys = const (3.88)
Zależność (3.88) jest warunkiem koniecznym i wystarczającym statycznego wyrównoważenia mechanizmu płaskiego.
Przedstawimy obecnie na przykładach metodę wyrównoważania płaskich mechanizmów.
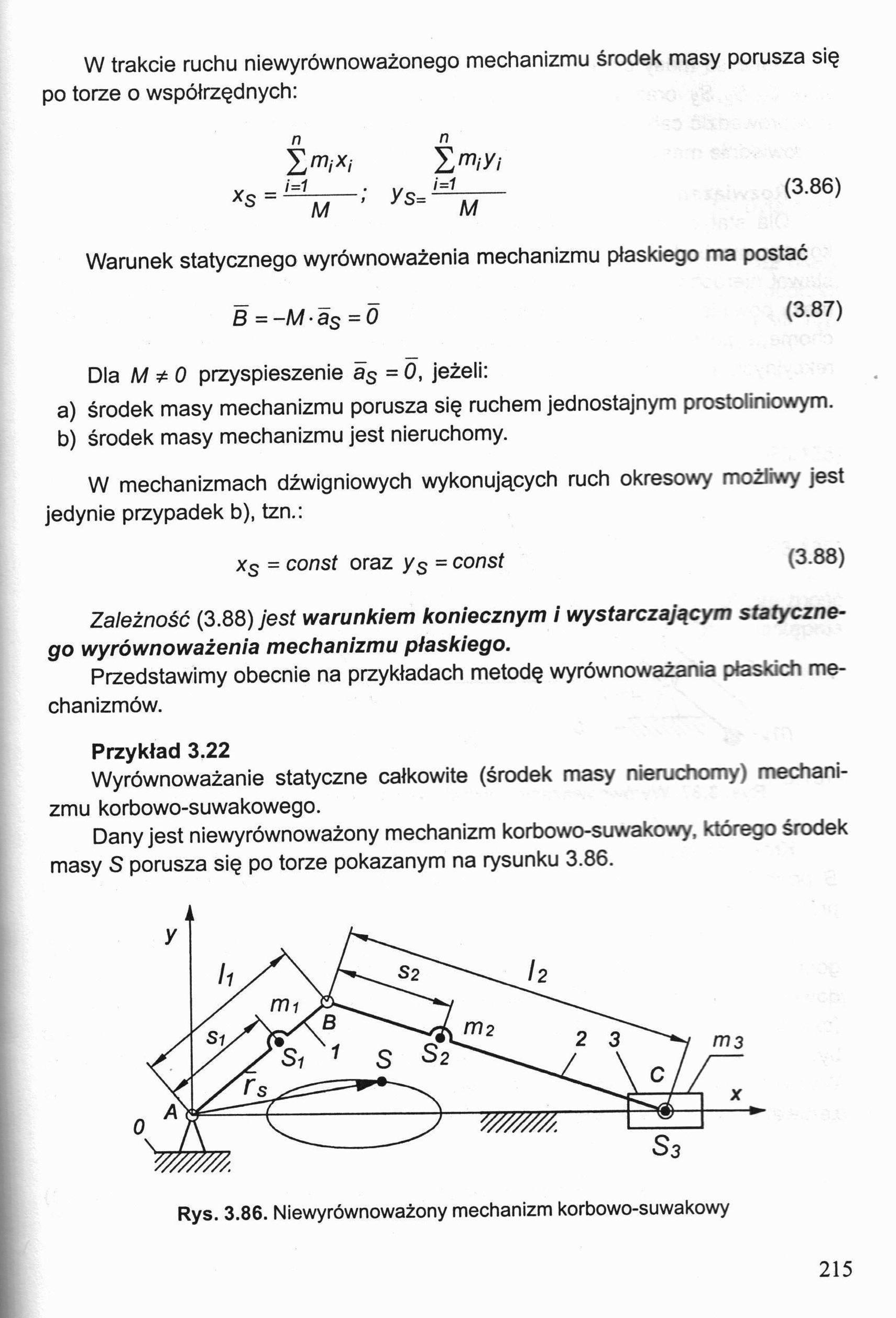
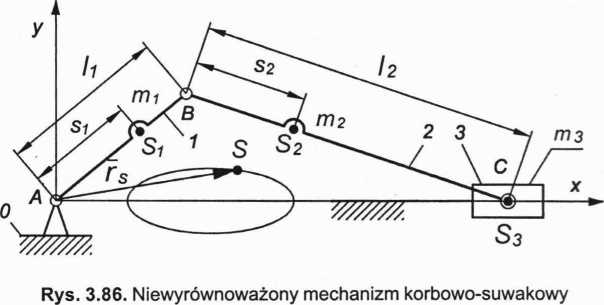
Przykład 3.22
Wyrównoważanie statyczne całkowite (środek masy nieruchomy) mechanizmu korbowo-suwakowego.
Dany jest niewyrównoważony mechanizm korbowo-suwakowy, którego środek masy S porusza się po torze pokazanym na rysunku 3.86.
215
Wyszukiwarka
Podobne podstrony:
24 luty 07 (147) 4. KOMPUTEROWE MODELOWANIE I ANALIZA MECHANIZMÓW Rozwiązywanie zagadnień analizy me
24 luty 07 (149) Podstawowymi składnikami budowy mechanizmów prostych i złożonych są grupy struktura
24 luty 07 (159) Literatura [1] Artobolewskij I.I.: Tieorija mechanizmov i maszin.
24 luty 07 (34) Moc sił tarcia w mechanizmach zależy od wielu parametrów konstrukcyjnych, kinematycz
24 luty 07 (36) Całkowitą moc traconą w mechanizmie wyznaczamy, sumując moce tracone w jego wszystki
24 luty 07 (64) 3.6.4. Wyrównoważanie statyczne płaskich mechanizmów dźwigniowych W wielu przypadkac
24 luty 07 (9) Rys. 3.41. Analiza siłowa mechanizmu krzywkowego: a) mechanizm krzywkowy z popycha-cz
24 luty 07 (58) Przykład 3.20 Dany jest wirnik o masie M obracający się wokół osi Oz z prędkością ką
24 luty 07 (62) Rys. 3.84. Schemat dwucylindrowego silnika w układzie rzędowym Na podstawie (3.77) w
egzamin mechanika 2 Zad 5. Punkt M porusza się po krzywej zgodnie z równaniem e-b(9w Kąl zawarty pom
24 luty 07 (28) Rysunek 3.57 przedstawia wieloboki sił wykonane w trakcie analizy mechanizmu bez uwz
24 luty 07 (71) ruch postępowy masa mc = m3 + m2c pozostaje niewyrównoważona i dlatego środek masy m
23 luty 07 (50) Podczas ruchu mechanizmu suwak 4 pozostaje stale w płaszczyźnie Oxy, a zatem jego ru
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (104) Prędkość kątową a>p w ruchu ustalonym podczas przecinania znajdziemy z zależnośc
24 luty 07 (109) Etap 6 Całkowanie dynamicznego równania ruchu a-j -bu>i = J2 dco1 ~df (P3.219) (
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
24 luty 07 (116) 3.7.6. Rozwiązanie dynamicznego równania ruchu maszyny metodą równań różnicowych Pr
24 luty 07 (11) Uogólnionym przesunięciem przygotowanym <% w ruchu postępowym lub 8ęj w ruchu obr
więcej podobnych podstron