23 luty 07 (50)
Podczas ruchu mechanizmu suwak 4 pozostaje stale w płaszczyźnie Oxy, a zatem jego ruch względem układu nieruchomego jest ruchem płaskim. Ten ruch płaski suwaka można traktować jako ruch złożony z ruchu unoszenia prowadnicy 2 i ruchu względnego suwaka 4 względem prowadnicy 2. Obserwując ruch suwaka 4 w ruchomym wykonującym ruch płaski układzie współrzędnych 0,^/j widzimy, że przemieszcza się on po krzywoliniowej prowadnicy 2. Torem środka suwaka (w tym przypadku punktu D) w ruchu względnym jest krzywa BC.
Ruch unoszenia prowadnicy (układu O^rj) może być w ogólnym przypadku ruchem postępowym, obrotowym lub ruchem płaskim. Ten ostatni przypadek przedstawiono na rysunku 2.11.
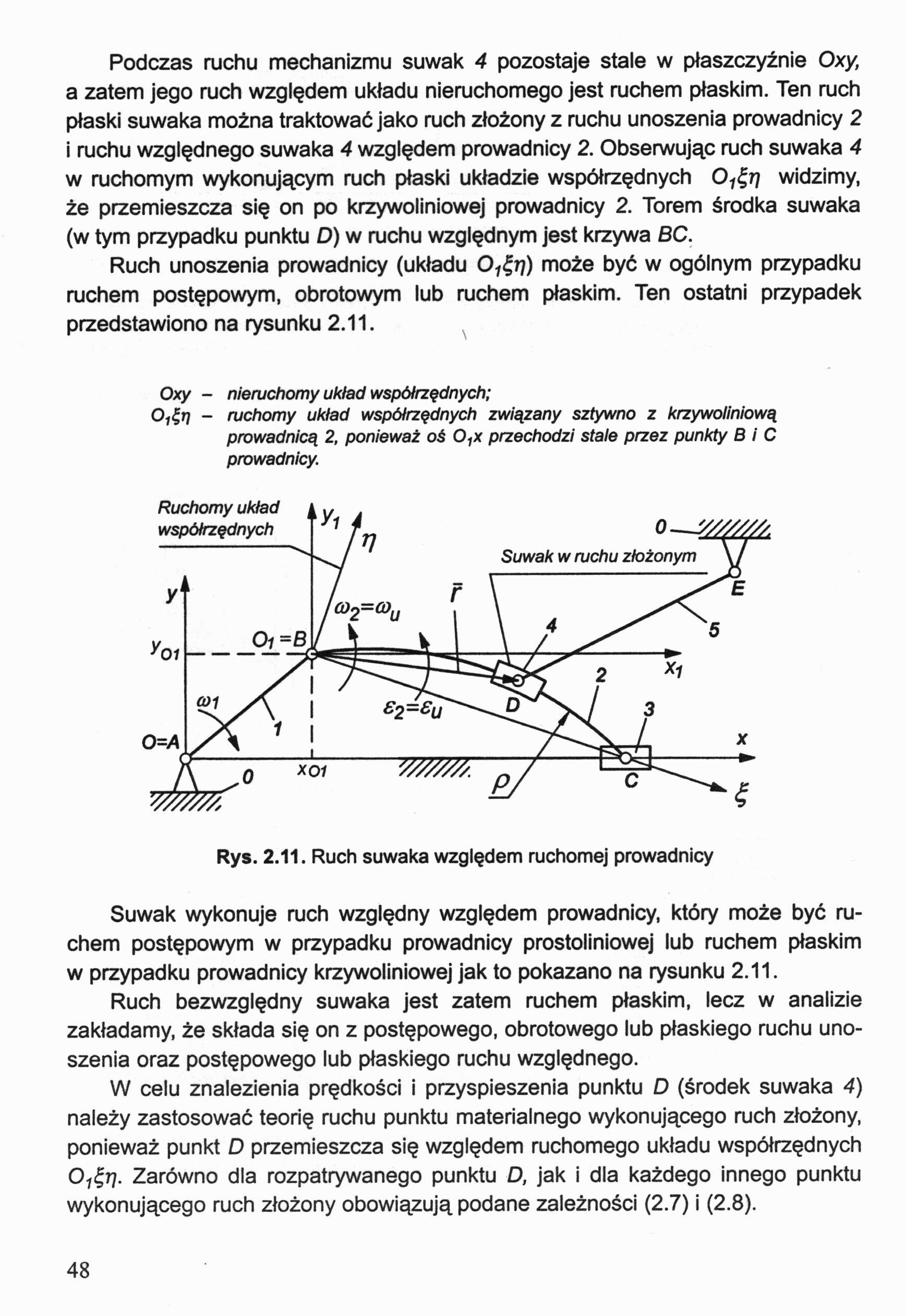
Oxy - nieruchomy ukiad współrzędnych;
O^r) - ruchomy układ współrzędnych związany sztywno z krzywoliniową prowadnicą 2, ponieważ oś 0,x przechodzi stale przez punkty B i C prowadnicy.

Rys. 2.11. Ruch suwaka względem ruchomej prowadnicy
Suwak wykonuje ruch względny względem prowadnicy, który może być ruchem postępowym w przypadku prowadnicy prostoliniowej lub ruchem płaskim w przypadku prowadnicy krzywoliniowej jak to pokazano na rysunku 2.11.
Ruch bezwzględny suwaka jest zatem ruchem płaskim, lecz w analizie zakładamy, że składa się on z postępowego, obrotowego lub płaskiego ruchu unoszenia oraz postępowego lub płaskiego ruchu względnego.
W celu znalezienia prędkości i przyspieszenia punktu D (środek suwaka 4) należy zastosować teorię ruchu punktu materialnego wykonującego ruch złożony, ponieważ punkt D przemieszcza się względem ruchomego układu współrzędnych O^rj. Zarówno dla rozpatrywanego punktu D, jak i dla każdego innego punktu wykonującego ruch złożony obowiązują podane zależności (2.7) i (2.8).
48
Wyszukiwarka
Podobne podstrony:
23 luty 07 (31) Tablica 1.3 Schematy mechanizmów podstawowych klasy 2 z członem napędzającym 30
23 luty 07 (38) 2. ANALIZA KINEMATYCZNA MECHANIZMÓW PŁASKICH2.1. CELI ZAKRESANALIZY KINEMATYCZNEJ ME
23 luty 07 (49) 1 B człon w ruchu płaskim W celu wyznaczenia chwilowego środka obrotu członu 2 rysuj
23 luty 07 (7) 4. KOMPUTEROWE MODELOWANIE I ANALIZA MECHANIZMÓW.......... 297 4.1.
23 luty 07 (8) WSTĘP Teoria maszyn i mechanizmów (TMM) należy do dyscypliny mechanika i obejmuje pro
23 luty 07 (92) Etap 2 Analiza mechanizmu korbowo-suwakowego opisanego wielobokiem wektorowym (P2.92
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (113) 3. DYNAMIKA MECHANIZMÓW I MASZYN3.1. CELI ZAKRESANALIZY DYNAMICZNEJ MECHANIZMÓW Dyn
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (118) W mechanizmach i maszynach wolnobieżnych, gdzie siły bezwładności są małe w porówna
23 luty 07 (121) Siły bezwładności przyłożone do członu w ruchu obrotowym Przypadek ogólny przedstaw
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (125) Para kinematyczna klasa 5 postępowa - suwak i prowadnica Możliwe są trzy warianty u
23 luty 07 (128) Wariant D Wariant ten przedstawia przypadek szczególny pary kinematycznej suwak-pro
23 luty 07 (130) Jeżeli w mechanizmie zastąpimy pary kinematyczne ki. 4 parami ki. 5, to równanie (3
23 luty 07 (135) Grafoanalityczna metoda wyznaczania reakcji dynamicznych w parach kinematycznych wy
23 luty 07 (136) Wyznaczamy siły ciężkości: G? = m^g, G2 = m2g, G3 = m3g. Na mechanizm działa dodatk
23 luty 07 (140) Przykład 3.3 Mechanizm czworoboku przegubowego Przeprowadzić analizę kinetostatyczn
23 luty 07 (141) Mechanizm obciążony siłami zewnętrznymi, czyli siłami bezwładności i oporu użyteczn
więcej podobnych podstron