23 luty 07 (126)
Proponowany sposób oswobadzania od więzów jest wygodny przy rozwiązywaniu zadań z uwzględnieniem tarcia oczywiście po odchyleniu reakcji o kąt tarcia.
Uwalnianie od więzów członów w parze postępowej według wariantu B przedstawiono na rysunkach 3.1 Oa, b i c.
Poszczególne rysunki przedstawiają:
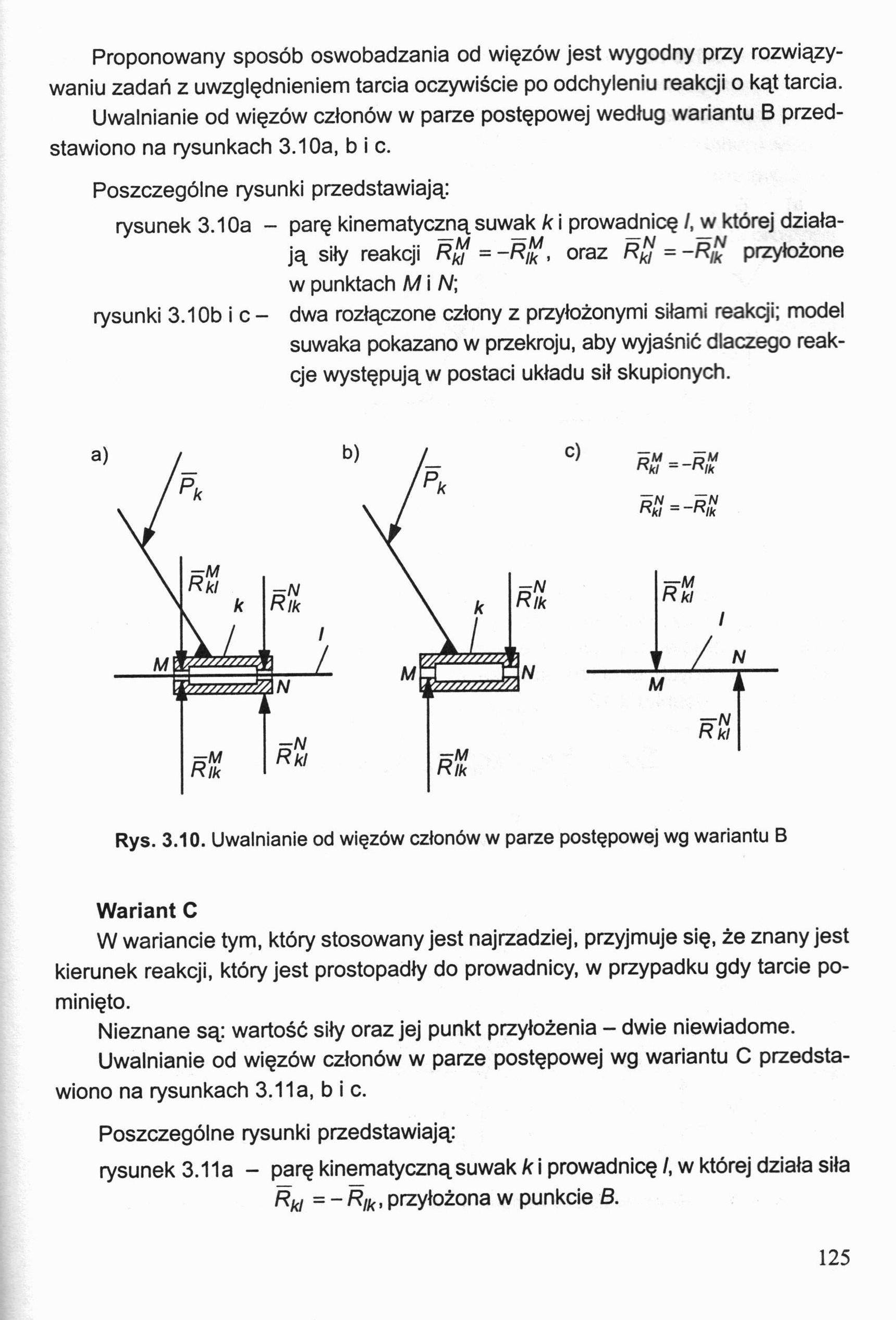
rysunek 3.10a - parę kinematyczną suwak k i prowadnicę /, w której działają siły reakcji R^f = -Rft? , oraz R$ = -R^ przyłożone w punktach M i A/;
rysunki 3.1 Ob i c - dwa rozłączone człony z przyłożonymi siłami reakcji; model suwaka pokazano w przekroju, aby wyjaśnić dlaczego reakcje występują w postaci układu sił skupionych.
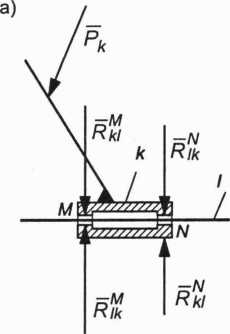
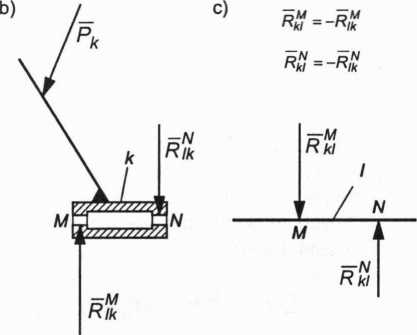
Rys. 3.10. Uwalnianie od więzów członów w parze postępowej wg wariantu B
Wariant C
W wariancie tym, który stosowany jest najrzadziej, przyjmuje się, że znany jest kierunek reakcji, który jest prostopadły do prowadnicy, w przypadku gdy tarcie pominięto.
Nieznane są: wartość siły oraz jej punkt przyłożenia - dwie niewiadome.
Uwalnianie od więzów członów w parze postępowej wg wariantu C przedstawiono na rysunkach 3.11 a, b i c.
Poszczególne rysunki przedstawiają:
rysunek 3.11 a - parę kinematyczną suwak k i prowadnicę /, w której działa siła Rkl = ~ R/k > przyłożona w punkcie B.
125
Wyszukiwarka
Podobne podstrony:
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
23 luty 07 (78) Każdy z wektorów /,- tego wieloboku zdefiniowany jest we współrzędnych biegunowych p
24 luty 07 (28) Rysunek 3.57 przedstawia wieloboki sił wykonane w trakcie analizy mechanizmu bez uwz
23 luty 07 (125) Para kinematyczna klasa 5 postępowa - suwak i prowadnica Możliwe są trzy warianty u
23 luty 07 (127) rysunki 3.11 b i c - dwa rozłączone człony z przyłożonymi siłami reakcji przesunięt
23 luty 07 (129) Rysunek 3.14 przedstawia uwalnianie od więzów członów w parze wyższej ki. 4. Poszcz
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (147) Na rysunku 3.28a przedstawiono uwolnioną od więzów grupę strukturalną (2, 3) z przy
23 luty 07 (149) Uwalniając suwak od więzów (rys. 3.31) naieżałobyzatem przyłożyć normalne siły reak
23 luty 07 (150) Uwalniamy teraz od więzów grupę strukturalną (2, 3) (rys. 3.32a). a) / b) 3 C *03 R
23 luty 07 (151) 1 1 R0i - O Rys. 3.33. Człon napędzający mechanizmu Oldhama oswobodzony od więzów P
23 luty 07 (27) Grupę strukturalną definiuje się w sposób umowny na podstawie liczby członów i par o
23 luty 07 * * AA>TEORIA MASZYN I $ Q19-2004 JOZEF FELIS, HUBERT JAWOROWSKI, JACEK CIEŚLIK * *CZE
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (102) koło bjest nieruchome, cob = 0, natomiast koło a i jarzmo są członami ruchomymi, ry
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
więcej podobnych podstron