23 luty 07 (27)
Grupę strukturalną definiuje się w sposób umowny na podstawie liczby członów i par oraz sposobu przyłączenia ich do podstawy.
Definiuje się pojęcie rzędu i klasy grupy.
O klasie grupy decyduje najbardziej rozbudowany wielobok występujący w schemacie grupy. Klasa grupy jest równa liczbie boków tego wieloboku.
Rząd grupy strukturalnej jest określony poprzez liczbę półpar kinematycznych zewnętrznych, za pomocą których łączy się grupę z podstawą, aby zamienić ją w układ sztywny.
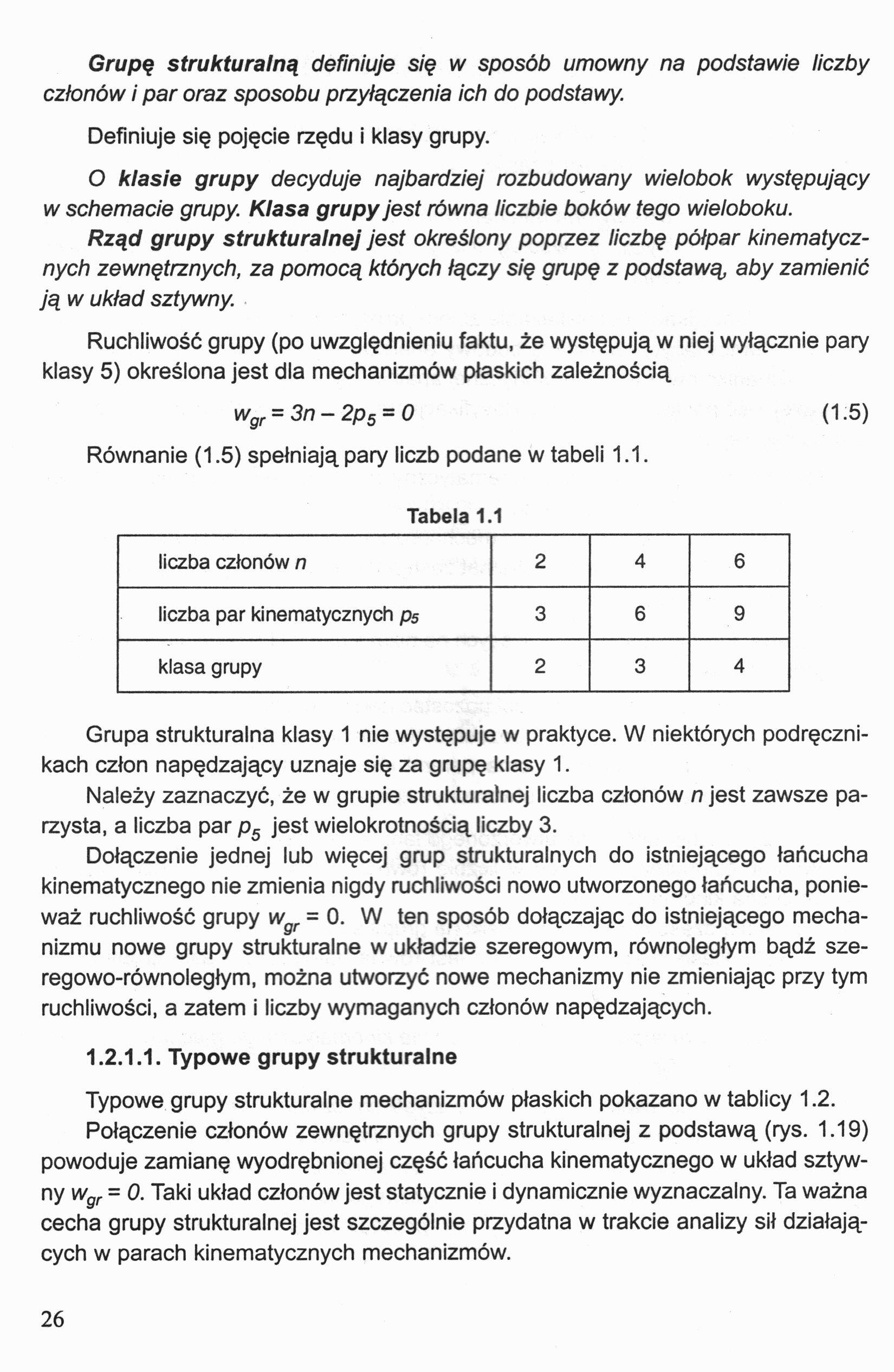
Ruchliwość grupy (po uwzględnieniu faktu, że występują w niej wyłącznie pary klasy 5) określona jest dla mechanizmów płaskich zależnością
wgr = 3n-2ps = 0 (1.5)
Równanie (1.5) spełniają pary liczb podane w tabeli 1.1.
Tabela 1.1
|
liczba członów n |
2 |
4 |
6 |
|
liczba par kinematycznych p5 |
3 |
6 |
9 |
|
klasa grupy |
2 |
3 |
4 |
Grupa strukturalna klasy 1 nie występuje w praktyce. W niektórych podręcznikach człon napędzający uznaje się za grupę klasy 1.
Należy zaznaczyć, że w grupie strukturalnej liczba członów n jest zawsze parzysta, a liczba par p5 jest wielokrotnością liczby 3.
Dołączenie jednej lub więcej grup strukturalnych do istniejącego łańcucha kinematycznego nie zmienia nigdy ruchliwości nowo utworzonego łańcucha, ponieważ ruchliwość grupy wgr = 0. W ten sposób dołączając do istniejącego mechanizmu nowe grupy strukturalne w układzie szeregowym, równoległym bądź sze-regowo-równoległym, można utworzyć nowe mechanizmy nie zmieniając przy tym ruchliwości, a zatem i liczby wymaganych członów napędzających.
1.2.1.1. Typowe grupy strukturalne
Typowe grupy strukturalne mechanizmów płaskich pokazano w tablicy 1.2.
Połączenie członów zewnętrznych grupy strukturalnej z podstawą (rys. 1.19) powoduje zamianę wyodrębnionej część łańcucha kinematycznego w układ sztywny wgr = 0. Taki układ członów jest statycznie i dynamicznie wyznaczalny. Ta ważna cecha grupy strukturalnej jest szczególnie przydatna w trakcie analizy sił działających w parach kinematycznych mechanizmów.
26
Wyszukiwarka
Podobne podstrony:
23 luty 07 (70) Przyspieszenie względne (aDB) można wyznaczyć również na podstawie znajomości długoś
23 luty 07 (68) Ponieważ suwak 3 obraca się razem z jarzmem, to jego prędkość kątowa jest równa pręd
23 luty 07 (137) Zapisujemy wektorowe równania równowagi sił działających na człony 2 i 3: dla człon
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (20) 1.1.6. Ruchliwość mechanizmu Liczba stopni swobody względem nieruchomej podstawy, kt
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (147) Na rysunku 3.28a przedstawiono uwolnioną od więzów grupę strukturalną (2, 3) z przy
23 luty 07 (150) Uwalniamy teraz od więzów grupę strukturalną (2, 3) (rys. 3.32a). a) / b) 3 C *03 R
23 luty 07 (146) mi,Jsi B 2 Rozwiązanie Mechanizm, podobnie jak poprzednie, składa się z członu napę
23 luty 07 (25) Przykład 1.7 (rys. 1.17)Ruchliwość teoretyczna wt = 3n - 2p5 - p4 = 0. Mechanizm ma
23 luty 07 (26) 1.2. KLASYFIKACJA MECHANIZMÓW1.2.1. Zasady klasyfikacji strukturalnej mechanizmów pł
23 luty 07 (28) Tablica 1.2 Typowe grupy strukturalne Rys. 1.19. Przykłady zamiany grupy strukturaln
23 luty 07 (33) 1.2.1.4. Przykłady klasyfikacji strukturalnej Przykład 1.12 (rys. 1.23) Grupa strukt
23 luty 07 (34) Przykład 1.14 (rys. 1.25) Grupa strukturalna n = 2,ps = 3, wgr = O Grupa strukturaln
23 luty 07 (37) 1.2.2. Zasady klasyfikacji funkcjonalnej mechanizmów Klasyfikacja strukturalna mecha
23 luty 07 (45) Przyspieszenie dowolnego punktu K wyraża się wzorem (2.4) aK=aU+aW = a01 + aK01 +
23 luty 07 (53) Rys. 2.13. Składowe przyspieszeń suwaka 2 poruszającego się po prostoliniowej prowad
23 luty 07 (65) Następnie zapisujemy równanie prędkości punktu S2, który znajduje się na członie 2 s
23 luty 07 (73) Następnie zapisujemy równanie przyspieszenia punktu B2, który znajduje się na członi
więcej podobnych podstron