23 luty 07 (68)

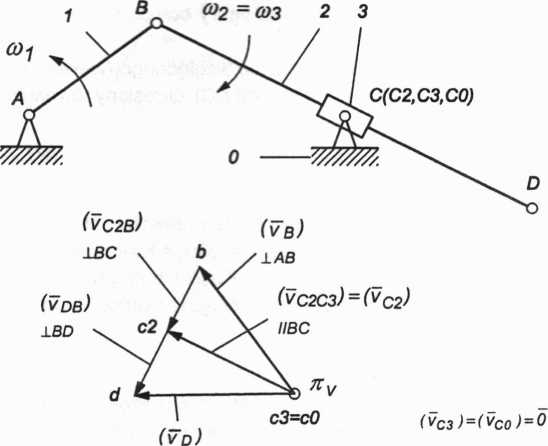
Ponieważ suwak 3 obraca się razem z jarzmem, to jego prędkość kątowa jest równa prędkości kątowej jarzma co2 = co3.
W celu znalezienia prędkości liniowych należy rozwiązać układ równań (P2.25) porównując ich prawe strony:
(VC2) ~ (vb) + (vC2b) ŁAB 1BC
(v C2) = (vC3) + (v C2C3) = 0 IIBC
Rozwiązaniem układu równań (P2.25) jest plan prędkości (rys. 2.21).
(P2.25)
Podziałka przemieszczeń AB
ki =
Podziałka prędkości
-i'
kv —
_ VB
Rys. 2.21. Plan prędkości mechanizmu jarzmowego
(AB)
mm
ms
(VB)
mm
Korzystając z planu prędkości znajdziemy prędkość kątową w2 = ^Vc2B^
BC
Następnie znajdziemy prędkość punktu D
(P2.26)
(v d) ~ (v B ) + (v DB ) 1BD
gdzie vDB = w2BD.
66
Wyszukiwarka
Podobne podstrony:
23 luty 07 (106) Znak (-) we wzorze (P2.102) oznacza, że zwrot prędkości kątowej satelity 2 jest prz
23 luty 07 (149) Uwalniając suwak od więzów (rys. 3.31) naieżałobyzatem przyłożyć normalne siły reak
23 luty 07 (27) Grupę strukturalną definiuje się w sposób umowny na podstawie liczby członów i par o
23 luty 07 (133) Rozwiązanie w układzie płaskim dowolnego równania wektorowego, czyli narysowanie pl
23 luty 07 (125) Para kinematyczna klasa 5 postępowa - suwak i prowadnica Możliwe są trzy warianty u
23 luty 07 (128) Wariant D Wariant ten przedstawia przypadek szczególny pary kinematycznej suwak-pro
23 luty 07 (146) mi,Jsi B 2 Rozwiązanie Mechanizm, podobnie jak poprzednie, składa się z członu napę
23 luty 07 (45) Przyspieszenie dowolnego punktu K wyraża się wzorem (2.4) aK=aU+aW = a01 + aK01 +
23 luty 07 (50) Podczas ruchu mechanizmu suwak 4 pozostaje stale w płaszczyźnie Oxy, a zatem jego ru
23 luty 07 (53) Rys. 2.13. Składowe przyspieszeń suwaka 2 poruszającego się po prostoliniowej prowad
23 luty 07 (65) Następnie zapisujemy równanie prędkości punktu S2, który znajduje się na członie 2 s
23 luty 07 (73) Następnie zapisujemy równanie przyspieszenia punktu B2, który znajduje się na członi
23 luty 07 (79) Mechanizm płaski zdefiniowany jest przez zamknięty wielobok składający się z n wekto
24 luty 07 (37) Ponieważ obydwie siły przyłożone są w tym samym punkcie S, który porusza się z prędk
skanuj0030 4 Próba ścisła rozciągania metali 29 Ponieważ lusterko obraca się o kąt a, całkowity kąt
23 luty 07 * * AA>TEORIA MASZYN I $ Q19-2004 JOZEF FELIS, HUBERT JAWOROWSKI, JACEK CIEŚLIK * *CZE
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
więcej podobnych podstron