23 luty 07 (78)
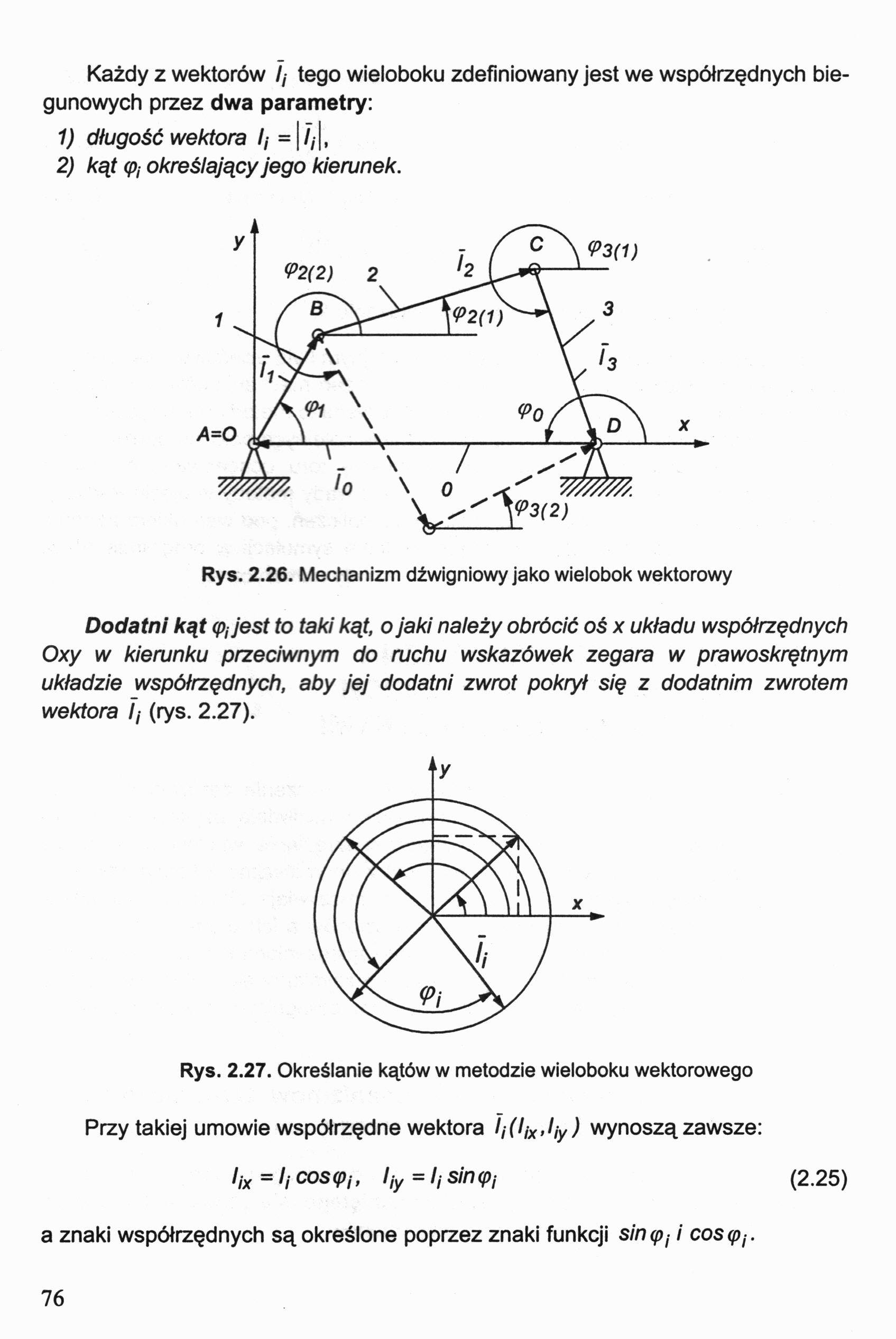
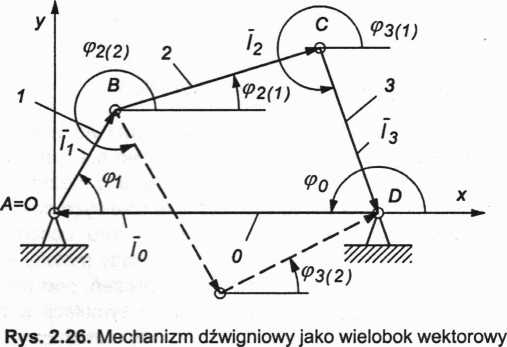
Każdy z wektorów /,- tego wieloboku zdefiniowany jest we współrzędnych biegunowych przez dwa parametry:
1) długość wektora /,■ =|//|,
2) kąt q>j określający jego kierunek.
Dodatni kąt (pjjest to taki kąt, o jaki należy obrócić oś x układu współrzędnych Oxy w kierunku przeciwnym do ruchu wskazówek zegara w prawoskrętnym układzie współrzędnych, aby jej dodatni zwrot pokrył się z dodatnim zwrotem wektora Ij (rys. 2.27).
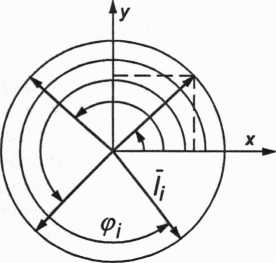
Rys. 2.27. Określanie kątów w metodzie wieloboku wektorowego
Przy takiej umowie współrzędne wektora h(hx>liy) wynoszą zawsze:
lix = Ij cos<Pj, liy = Ij simpi (2.25)
a znaki współrzędnych są określone poprzez znaki funkcji s/n<p(- i cosrp,.
76
Wyszukiwarka
Podobne podstrony:
23 luty 07 (137) Zapisujemy wektorowe równania równowagi sił działających na człony 2 i 3: dla człon
23 luty 07 (139) Równanie wektorowe równowagi sił działających na człon napędzający ma postać (P3.9)
23 luty 07 (54) graficzne wektorów prędkości i przyspieszeń stanowiących odpowiedniki wektorów rzecz
23 luty 07 (69) Rysując wektor (vDB) z końca wektora (vB) znajdziemy punkt d stanowiący koniec wekto
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (126) Proponowany sposób oswobadzania od więzów jest wygodny przy rozwiązywaniu zadań z u
23 luty 07 (145) kierunków sił (Pri) i (W). Kierunek reakcji (R01) określa prosta przechodząca przez
23 luty 07 (63) Na przecięciu kierunków przyspieszeń (afKB) i (afKC) otrzymamy punkt k. Biegun na łą
23 luty 07 (79) Mechanizm płaski zdefiniowany jest przez zamknięty wielobok składający się z n wekto
23 luty 07 (92) Etap 2 Analiza mechanizmu korbowo-suwakowego opisanego wielobokiem wektorowym (P2.92
23 luty 07 (119) W równaniach (3.1) i (3.2) przyjęto oznaczenia: Pi - wektor główny sił zewnętrznych
23 luty 07 (133) Rozwiązanie w układzie płaskim dowolnego równania wektorowego, czyli narysowanie pl
23 luty 07 (55) Oznacza to, że długości rysunkowe wektorów prędkości liniowej oraz przyspieszenia li
23 luty 07 (87) Rozwiązanie Na podstawie rysunku 2.30 zapiszemy równanie wektora promienia wodzącego
23 luty 07 (88) Cosinusy kierunkowe, jakie tworzy wektor vK z osiami układu współrzędnych, określają
23 luty 07 (89) Rozwiązanie Wpisujemy w analizowany mechanizm zamknięty trójkąt wektorów i zapisujem
23 luty 07 * * AA>TEORIA MASZYN I $ Q19-2004 JOZEF FELIS, HUBERT JAWOROWSKI, JACEK CIEŚLIK * *CZE
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
więcej podobnych podstron