24 luty 07 (73)

3.7. MODELOWANIE DYNAMICZNE MASZYN
Jedną z dziedzin fenomenologii, czyli nauki o poznaniu zjawiska, jest jej dział zajmujący się szeroko rozumianym modelowaniem dynamicznym układów fizycznych (mechanicznych, elektrycznych, elektronicznych, hydraulicznych, pneumatycznych, analogowych, cyfrowych, hybrydowych itp.).
Problem modelowania dynamicznego układów napędowych mechanizmów i maszyn jest zatem szczególnym przypadkiem modelowania dynamicznego układów fizycznych. Napęd mechaniczny jest w ogólnym przypadku układem hybrydowym, w skład którego wchodzą elementy (zespoły) o różnorakim charakterze fizycznym. W niniejszej książce zajmiemy się modelowaniem dynamicznym układów napędowych składających się jedynie z elementów mechanicznych: mas, sprężystości i tłumienia. Budowa modeli dynamicznych nie jest łatwa. Wymaga gruntownej wiedzy z wielu działów fizyki i matematyki oraz dużo doświadczenia i intuicji inżynierskiej.
3.7.1. Etapy modelowania dynamicznego
i rodzaje modeli dynamicznych maszyn
Etapy modelowania dynamicznego układów fizycznych, a w szczególności modelowania dynamicznego maszyn i mechanizmów, można przedstawić graficznie w postaci schematu blokowego (rys. 3.93).
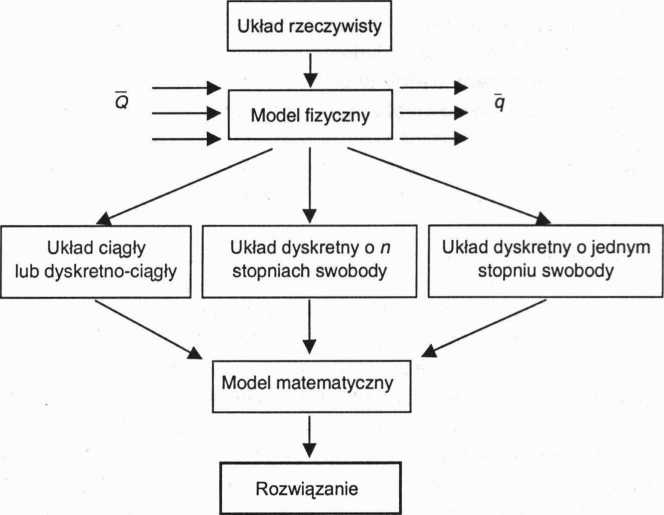
Rys. 3.93. Etapy modelowania dynamicznego i rodzaje modeli dynamicznych
223
Wyszukiwarka
Podobne podstrony:
24 luty 07 (116) 3.7.6. Rozwiązanie dynamicznego równania ruchu maszyny metodą równań różnicowych Pr
24 luty 07 (120) 3.7.7. Nierównomierność biegu maszyny.Dobór koła zamachowego Cechą charakterystyczn
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (53) Jeśli spełnione są równocześnie warunki (3.69) / (3.70), wówczas oś obrotu jest głów
23 luty 07 (133) Rozwiązanie w układzie płaskim dowolnego równania wektorowego, czyli narysowanie pl
24 luty 07 (147) 4. KOMPUTEROWE MODELOWANIE I ANALIZA MECHANIZMÓW Rozwiązywanie zagadnień analizy me
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (109) Etap 6 Całkowanie dynamicznego równania ruchu a-j -bu>i = J2 dco1 ~df (P3.219) (
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (122) Napiszemy teraz równanie ruchu maszyny w postaci energetycznej dla części cyklu zaw
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
24 luty 07 (148) 4.1.1. Zasady modelowania mechanizmów w programie AKMBudowa mechanizmów dźwigniowyc
24 luty 07 (153) W programie AKM można modelować grupę strukturalną w ten sposób, że będzie mieć pun
24 luty 07 (155) Rys. 4.8. Modelowanie i analiza kinematyczna mechanizmu złożonego o strukturze szer
24 luty 07 (25) Etap 3. Analiza statyczna z uwzględnieniem tarcia 1M(C)=0, M3-RT03-dT3 =0 (P3.73)
24 luty 07 (48) Maszyny o dużych wymiarach, ciężkie, trudne do demontażu można wyważać w trakcie eks
24 luty 07 (57) Ścisłe spełnienie warunków wyrównoważenia dynamicznego wirnika na etapie konstruowan
24 luty 07 (60) Należy wyznaczyć masy korekcyjne mk1, mk2 oraz ich położenie cpk1, ęk2 tak, aby wyró
24 luty 07 (75) Zatem przejście od rzeczywistego obiektu (maszyny), czyli układu o nieskończonej lic
więcej podobnych podstron