24 luty 07 (60)
Należy wyznaczyć masy korekcyjne mk1, mk2 oraz ich położenie cpk1, ęk2 tak, aby wyrównoważyć dynamicznie wał z zadanymi masami. Promienie korekcji wynoszą: rk1 = 20 mm, rk2 = 40 mm.
Rozwiązanie
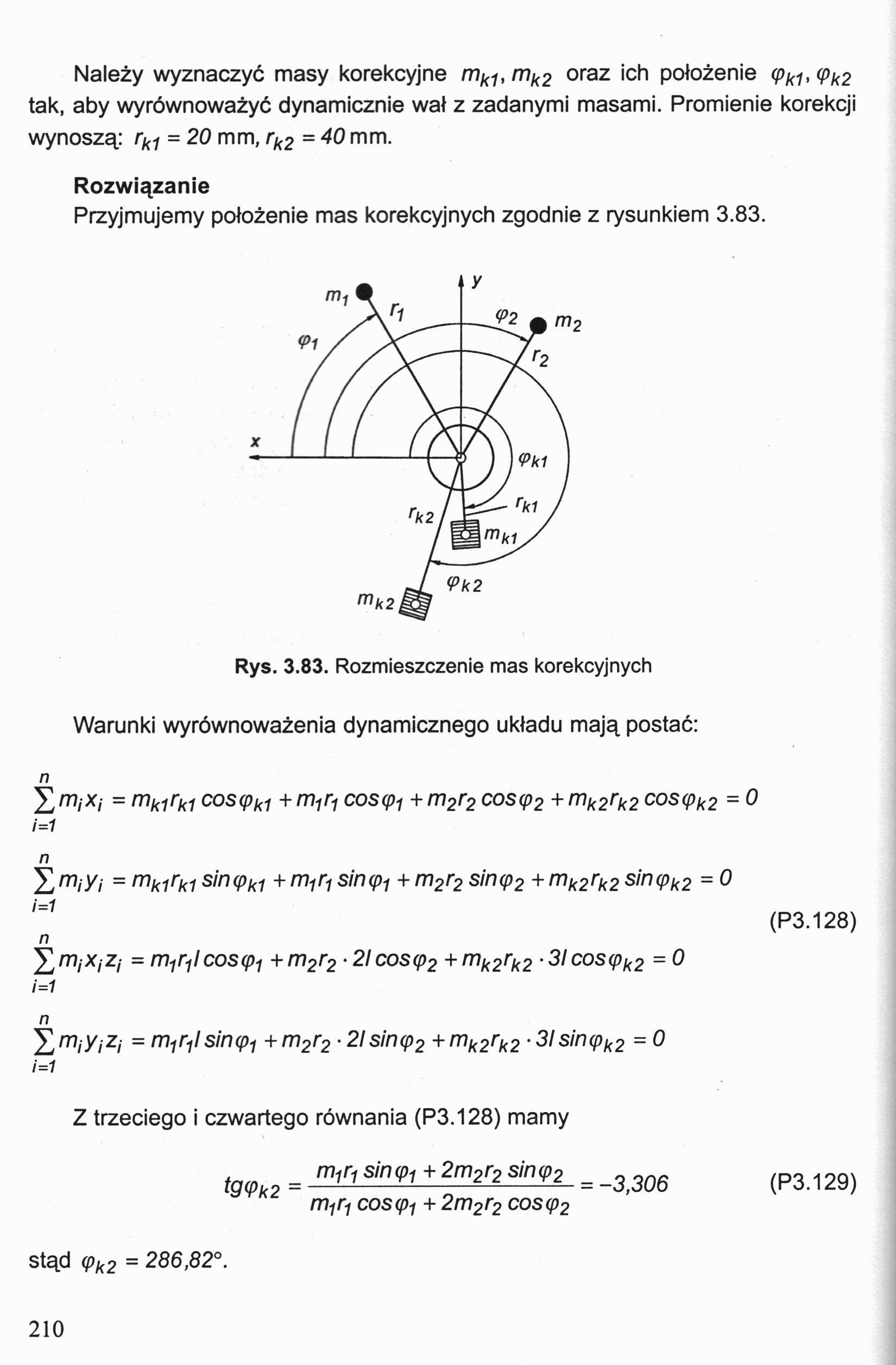
Przyjmujemy położenie mas korekcyjnych zgodnie z rysunkiem 3.83.
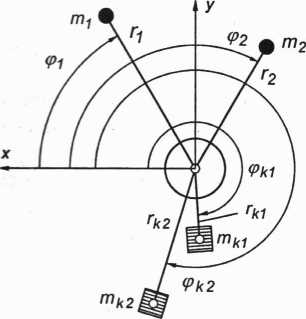
Rys. 3.83. Rozmieszczenie mas korekcyjnych
Warunki wyrównoważenia dynamicznego układu mają postać: n
5) mjXj = mk1rki cosęk1 + cosę-i + m2r2 cosę2 + mk2rk2 cosęk2 = 0
i=1 n
m,y(- = mk1rk1 sinęk1 + sinę-t + m2r2 sinę2 + mk2rk2 sirupk2 = 0
(P3.128)
n
'£imixjzi = m1r1lcosę1 +m2r2 ■ 21 cos<p2 +mk2rk2 ■3lcoscpk2 = 0 i=1 n
mjYjZj = m1r1l sinę1 + m2r2 ■ 21 sinę2 + mk2rk2 ■ 31 sinęk2 = 0
i=i
Z trzeciego i czwartego równania (P3.128) mamy
(P3.129)
_ sirupi + 2m2r2 simp2 = m-jr-f coscpt + 2m2r2 cosę2
stąd (pk2 = 286,82°.
210
Wyszukiwarka
Podobne podstrony:
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (66) Dane są masy członów mł = m3 =1 kg, m2 =2 kg umieszczone w środkach mas 8-1,82,83 or
24 luty 07 (86) W celu wyznaczenia Pzri posługujemy się modelem członu redukcji (rys. 3.99a), natomi
24 luty 07 (128) Obliczamy nadwyżki pracy sił czynnych i biernych pomiędzy tymi położeniami: L01 = -
24 luty 07 (61) Z czwartego równania (P3.128) mamy mk2 -m1r1sin(p1-2m2r2sin(p2 =1583g 3rk2 sinęk2 (P
24 luty 07 (35) Współczynnik sprawności można wyznaczyć analitycznie, korzystając ze wzorów (3.51).
23 luty 07 (60) Przykład 2.2 Mechanizm czworoboku przegubowego Wyznaczymy metodą planów prędkości i
24 luty 07 (106) Rozwiązanie Rozwiązanie zadania podzielimy na sześć etapów.Etap 1 Wyznaczenie zależ
24 luty 07 (107) Wyznaczenie pozostałych zależności (P3.204) D cos = m1; (Oj = cob; vA = rjcoj; vB =
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (129) Wyznaczamy współczynnik nierównomierności biegu, korzystając z jego definicji: cośr
24 luty 07 (145) Ad c) W przypadku zmian obciążenia silnika w bardzo szerokich granicach należy doda
24 luty 07 (21) Przykład 3.13 Wyznaczyć reakcje rĄt w punkcie A oraz siłę P2 w warunkach tarcia śliz
24 luty 07 (29) Przykład 3.16 Wyznaczyć reakcje w parach kinematycznych mechanizmu krzywkowego i mom
24 luty 07 (36) Całkowitą moc traconą w mechanizmie wyznaczamy, sumując moce tracone w jego wszystki
24 luty 07 (39) Na zakończenie należy zauważyć, że rozpatrywany model tarcia jest słuszny również dl
24 luty 07 (49) strumieni gazów lub cieczy, pól magnetycznych lub elektrycznych itp. Przykładem taki
24 luty 07 (65) W trakcie ruchu niewyrównoważonego mechanizmu środek masy porusza się po torze o wsp
24 luty 07 (6) Rys. 3.39. Analiza statyczna grupy strukturalnej P-0-0 z wykorzystaniem prostej Culma
więcej podobnych podstron