24 luty 07 (66)
Dane są masy członów mł = m3 =1 kg, m2 =2 kg umieszczone w środkach mas 8-1,82,83 oraz długości /r = 0,2m, Sj = 0,7 m, l2 = 0,4m, s2=0,2m. Należy przeprowadzić całkowite statyczne wyrównoważenie mechanizmu, wprowadzając odpowiednie masy korekcyjne (przeciwciężary).
Rozwiązanie
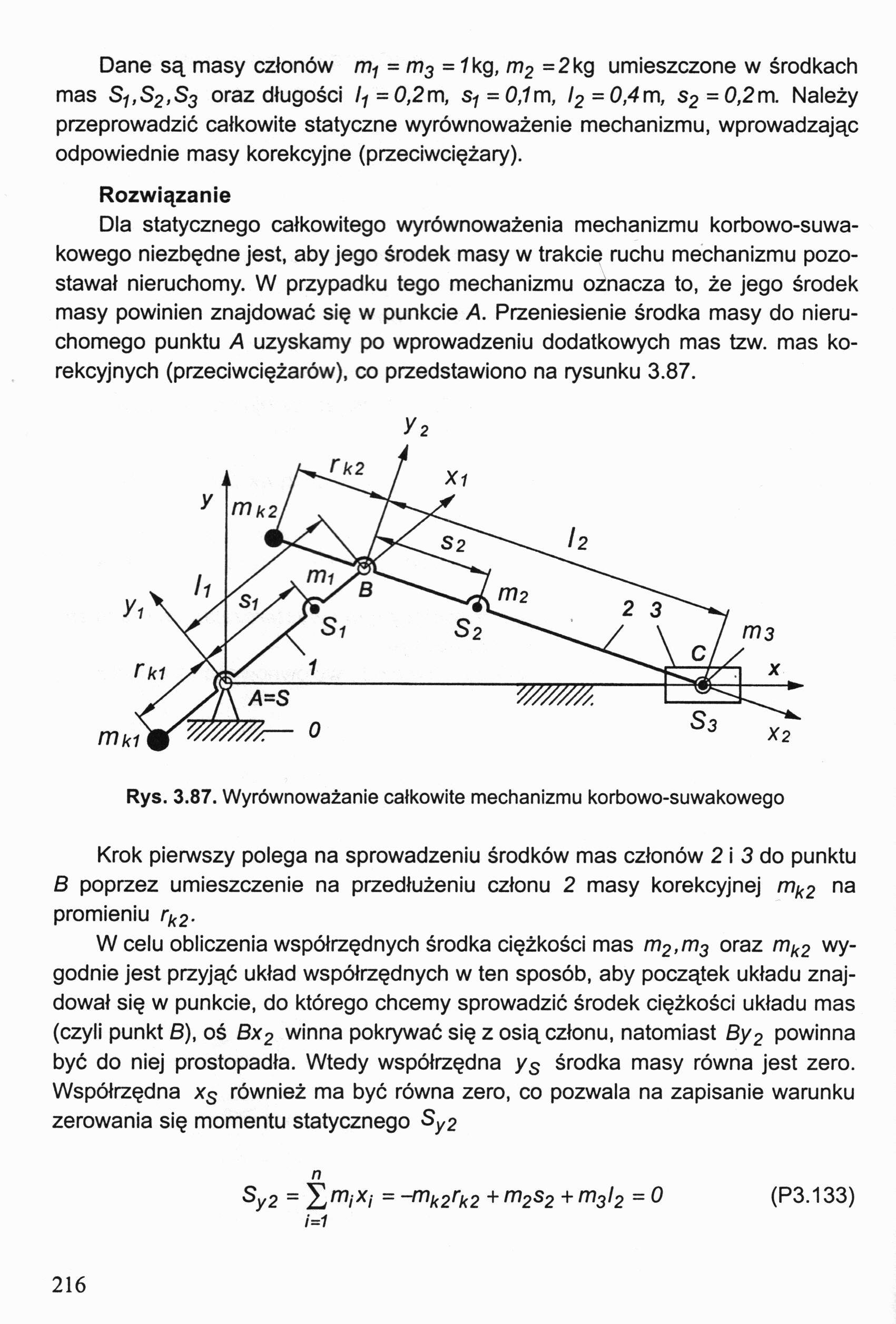
Dla statycznego całkowitego wyrównoważenia mechanizmu korbowo-suwa-kowego niezbędne jest, aby jego środek masy w trakcie ruchu mechanizmu pozostawał nieruchomy. W przypadku tego mechanizmu oznacza to, że jego środek masy powinien znajdować się w punkcie A. Przeniesienie środka masy do nieruchomego punktu A uzyskamy po wprowadzeniu dodatkowych mas tzw. mas korekcyjnych (przeciwciężarów), co przedstawiono na rysunku 3.87.
m

Rys. 3.87. Wyrównoważanie całkowite mechanizmu korbowo-suwakowego
Krok pierwszy polega na sprowadzeniu środków mas członów 2 i 3 do punktu B poprzez umieszczenie na przedłużeniu członu 2 masy korekcyjnej mk2 na promieniu rk2.
W celu obliczenia współrzędnych środka ciężkości mas m2,m3 oraz mk2 wygodnie jest przyjąć układ współrzędnych w ten sposób, aby początek układu znajdował się w punkcie, do którego chcemy sprowadzić środek ciężkości układu mas (czyli punkt B), oś Bx2 winna pokrywać się z osią członu, natomiast By2 powinna być do niej prostopadła. Wtedy współrzędna ys środka masy równa jest zero. Współrzędna xs również ma być równa zero, co pozwala na zapisanie warunku zerowania się momentu statycznego Sy2
n
Sy2 = £mixi = -mk2rk2 + m2s2 + m3l2 = 0
(P3.133)
216
Wyszukiwarka
Podobne podstrony:
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (60) Należy wyznaczyć masy korekcyjne mk1, mk2 oraz ich położenie cpk1, ęk2 tak, aby wyró
24 luty 07 (87) Dane: współczynnik sprężystości kD w punkcie D, współczynnik tłumienia wiskotycznego
24 luty 07 (12) Zasada mocy chwilowych. Jeżeli mechanizm złożony z członów sztywnych połączonych ze
24 luty 07 (149) Podstawowymi składnikami budowy mechanizmów prostych i złożonych są grupy struktura
24 luty 07 (37) Ponieważ obydwie siły przyłożone są w tym samym punkcie S, który porusza się z prędk
24 luty 07 (49) strumieni gazów lub cieczy, pól magnetycznych lub elektrycznych itp. Przykładem taki
24 luty 07 (52) Na podstawie (3.66) i (3.67) mamy: n n
24 luty 07 (53) Jeśli spełnione są równocześnie warunki (3.69) / (3.70), wówczas oś obrotu jest głów
24 luty 07 (65) W trakcie ruchu niewyrównoważonego mechanizmu środek masy porusza się po torze o wsp
24 luty 07 (68) wzrosną wartości momentów bezwładności JS1 i JS2 członów 1 i 2, co spowoduje znaczny
24 luty 07 (70) Zastąpienie członu 2 dwiema masami zastępczymi m2B, <^2C nie zmienia jego masy, j
24 luty 07 (71) ruch postępowy masa mc = m3 + m2c pozostaje niewyrównoważona i dlatego środek masy m
24 luty 07 (78) b)W/M. zr zr m zr Rys. 3.95. Jednomasowe modele graficzne członów redukcji: a) człon
24 luty 07 (81) Mamy:EZr = są (P3.153) 1 , 2 1 i 2 1 ,
23 luty 07 (39) Stosowane są również metody grafoanalityczne, które w zasadzie można zaliczyć do met
23 luty 07 (66) Łącząc biegun planu przyspieszeń na z punktem przecięcia b2 otrzymamy wartość przysp
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
więcej podobnych podstron