24 luty 07 (78)

zr
zr
m
zr
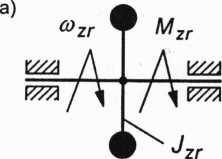
Rys. 3.95. Jednomasowe modele graficzne członów redukcji: a) człon redukcji w ruchu obrotowym: b) człon redukcji w ruchu postępowym
3.7.3. Redukcja mas i momentów bezwładności
Twierdzenie 3.3. Energia kinetyczna członu redukcji jest równa sumie energii kinetycznych członów ruchomych mechanizmu
Ezr = £E, (3.90)
n=1
gdzie:
Ezr - energia kinetyczna członu redukcji, Ej - energia kinetyczna i-tego członu.
Ponieważ człony ruchome mechanizmu płaskiego mogą wykonywać ruch postępowy, obrotowy lub płaski podamy wzory na obliczanie energii kinetycznej w tych ruchach.
Wprowadźmy oznaczenia:
i = 1, 2, 3,...,n
mi
m
zr
Joi ~
Jzr
Vsi -(O, -Vzr ~ w -, -
liczba członów ruchomych, masa i-tego członu,
masa zredukowana (masa członu redukcji), moment bezwładności /-tego członu względem jego osi obrotu Oh
moment bezwładności i-tego członu względem osi przechodzącej przez jego środek masy S,-,
zredukowany moment bezwładności ( moment bezwładności członu redukcji),
prędkość liniowa środka masy i-tego członu, prędkość kątowa i-tego członu, prędkość liniowa członu redukcji, prędkość kątowa członu redukcji.
228
Wyszukiwarka
Podobne podstrony:
24 luty 07 (30) Etapy 2 i 3. Analiza statyczna (rys. 3.59) Etap 2. Analiza sił działających na człon
24 luty 07 (130) stądJkp ~ J* a> zr CO r 4k zr,i (P3.274) Ponieważ wał pośredni obraca się zwykle
24 luty 07 (80) Występujące we wzorach (3.96) i (3.97) wyrażenia O2 (0: f 2 (Oi zr zr(O, oraz co,
24 luty 07 (94) i wówczas równania (3.113) oraz (3.114) przyjmują postać: Mzr = J7 d(Qzr . dt ’ zr =
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (124) Przykładowe charakterystyki Mc(ę) i Mb((p) pokazano na rysunku 3.121. Rys. 3.121. P
24 luty 07 (137) M. =a-bo) Ns =(a-bw )a N -a- 40 Rys. 3.131. Charakterystyka silnika o momencie lini
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
24 luty 07 (151) Rys. 4.3. Człony typu łącznik wraz z elementami określającymi położenie wybranych p
24 luty 07 (155) Rys. 4.8. Modelowanie i analiza kinematyczna mechanizmu złożonego o strukturze szer
24 luty 07 (16) Rys. 3.43. Stożek tarcia pary kinematycznej Rkt = -R,k - całkowita reakcja w parze p
24 luty 07 (20) Rys. 3.48. Analiza wykreślna warunku równowagi granicznej członu podpartego na podpo
24 luty 07 (22) Rys. 3.50. Tarcie w parze kinematycznej obrotowej Zjawisko tarcia oraz związane z ni
24 luty 07 (2) c* ^ b) Rys. 3.36. Analiza sił działających na człon napędzający: a) uwalnianie od wi
24 luty 07 (42) Rys. 3.68. Analiza statyczna mechanizmu z uwzględnieniem tarcia: a) analiza sił dzia
24 luty 07 (4) Rys. 3.37. Graficzne rozwiązanie zagadnienia równowagi płaskiego dowolnego układu czt
24 luty 07 (54) Rys. 3.74. Model fizyczny niewyrównoważonego wirnika w postaci cienkich niewyrównowa
więcej podobnych podstron