24 luty 07 (86)
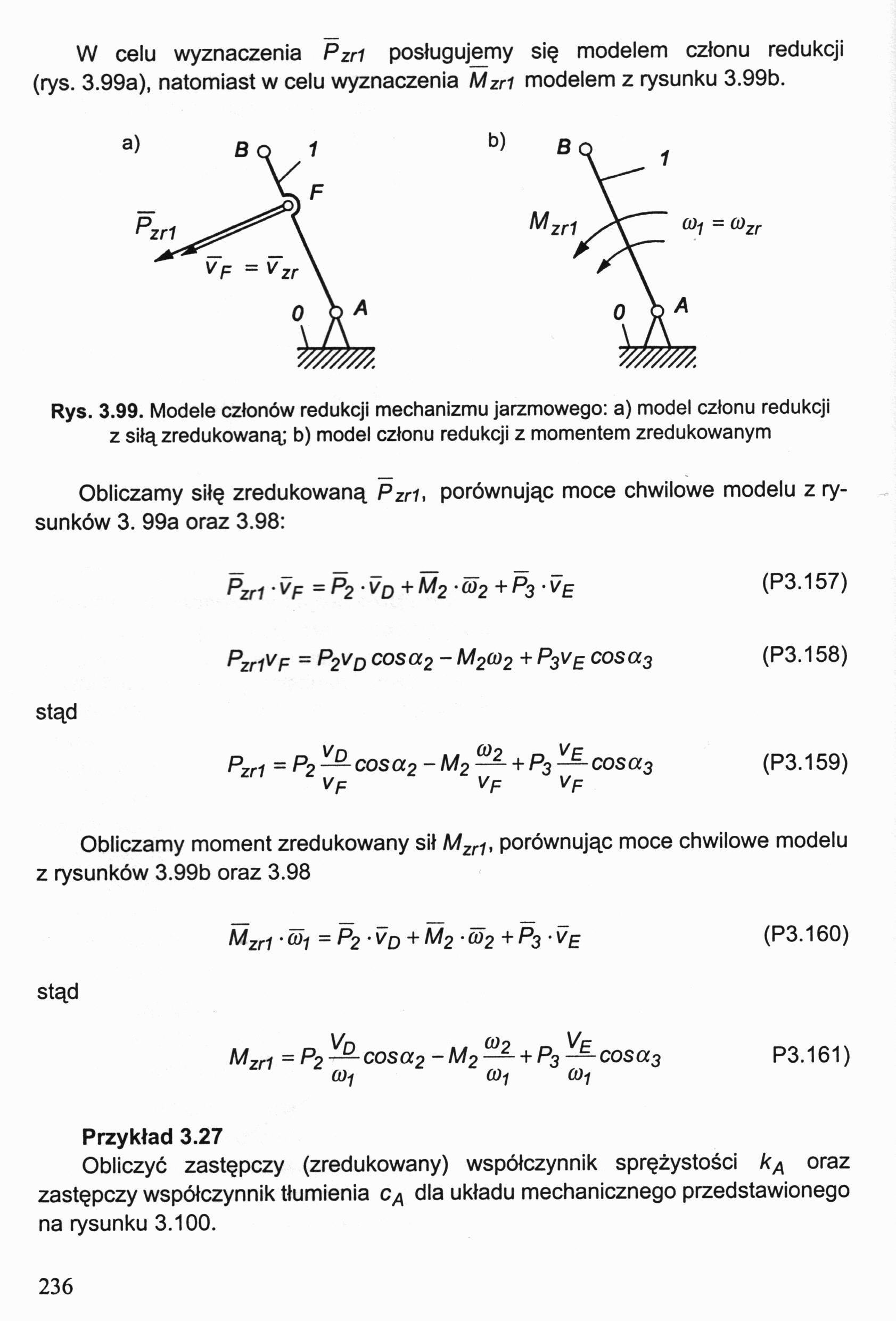
W celu wyznaczenia Pzri posługujemy się modelem członu redukcji (rys. 3.99a), natomiast w celu wyznaczenia Mzri modelem z rysunku 3.99b.

Rys. 3.99. Modele członów redukcji mechanizmu jarzmowego: a) model członu redukcji z siłą zredukowaną; b) model członu redukcji z momentem zredukowanym
Obliczamy siłę zredukowaną Pzri, porównując moce chwilowe modelu z rysunków 3. 99a oraz 3.98:
(P3.157)
Pzr 1 VF - Pz VD + ^2 'u>2 + P3 ’VE
PzrivF = P2VD cosa2 - M2a>2 + P3VE cosa3 (P3.158)
stąd
VF
co2
VF
VF
Pzri = P2 — cosa2 - M2 — + P3 — cosa3
(P3.159)
Obliczamy moment zredukowany sił Mzr1, porównując moce chwilowe modelu z rysunków 3.99b oraz 3.98
Mzri • (1)■) — P2 • vq + M2 • co2 + P3 ■ vE (P3.160)
stąd
Mzri ~ P2 — cosa2 -M2~ + P3~cosa3 P3.161)
U>1 U>1 CO-/
Przykład 3.27
Obliczyć zastępczy (zredukowany) współczynnik sprężystości kA oraz zastępczy współczynnik tłumienia cA dla układu mechanicznego przedstawionego na rysunku 3.100.
236
Wyszukiwarka
Podobne podstrony:
24 luty 07 (83) Po wprowadzeniu oznaczeń równanie (3.98) dla członu redukcji wykonującego ruch postę
23 luty 07 (86) W celu obliczenia przyspieszeń kątowych różniczkujemy równanie (P2.60) cofli cos(pi
24 luty 07 (60) Należy wyznaczyć masy korekcyjne mk1, mk2 oraz ich położenie cpk1, ęk2 tak, aby wyró
24 luty 07 (124) Przykładowe charakterystyki Mc(ę) i Mb((p) pokazano na rysunku 3.121. Rys. 3.121. P
24 luty 07 (74) Każdy układ rzeczywisty składa się z obiektu i otoczenia. Układ rzeczywisty może być
24 luty 07 (35) Współczynnik sprawności można wyznaczyć analitycznie, korzystając ze wzorów (3.51).
24 luty 07 (106) Rozwiązanie Rozwiązanie zadania podzielimy na sześć etapów.Etap 1 Wyznaczenie zależ
24 luty 07 (107) Wyznaczenie pozostałych zależności (P3.204) D cos = m1; (Oj = cob; vA = rjcoj; vB =
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (129) Wyznaczamy współczynnik nierównomierności biegu, korzystając z jego definicji: cośr
24 luty 07 (150) 4.1.2. Cechy geometryczne mechanizmów w programie AKM W celu przeprowadzenia analiz
24 luty 07 (21) Przykład 3.13 Wyznaczyć reakcje rĄt w punkcie A oraz siłę P2 w warunkach tarcia śliz
24 luty 07 (29) Przykład 3.16 Wyznaczyć reakcje w parach kinematycznych mechanizmu krzywkowego i mom
24 luty 07 (36) Całkowitą moc traconą w mechanizmie wyznaczamy, sumując moce tracone w jego wszystki
24 luty 07 (38) Znajdujemy teraz siłę tarcia T12. W tym celu siłę reakcji Rj2 zapisujemy w postaci d
24 luty 07 (6) Rys. 3.39. Analiza statyczna grupy strukturalnej P-0-0 z wykorzystaniem prostej Culma
24 luty 07 (88) lecz na podstawie (P3.162) mamy 2^ł _ ^ xA a stąd oraz xD _ d xA a’ (P3.164) W celu
24 luty 07 (8) Rys. 3.40. Analiza statyczna grupy strukturalnej P-0-0 z wykorzystaniem prostej Culma
23 luty 07 (83) W celu obliczenia przyspieszenia kątowego różniczkujemy (P2.47) względem czasu A .2
więcej podobnych podstron