24 luty 07 (56)

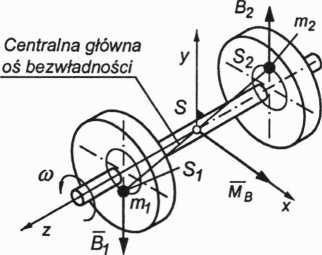
Założymy, że wał wirnika jest konstrukcyjnie i technologicznie wyrównoważo-ny. Stan wyrównoważenia wirnika będzie zatem wynikał z położenia środków mas S? i S2, odpowiednio dla mas i m2.
Uwzględniając położenie środków mas S1 i S2, otrzymamy cztery warianty stanu wyrównoważenia przedstawione kolejno na rysunkach rysunkach 3.76- 3.79.
y


xs = o, ys * 0, B = B1 + b2 * o Dxz = 0, Dyz = 0, Mg — 0
xs=o, ys =0, B =0
Dxz — 0, Dyz = 0, Mg — 0
Rys. 3J7. Wirnik niewyrównoważony B *0, niewyrównoważenie siłowe
Rys. 3.76. Wirnik wyrównoważony
xs =0, ys =0, B = S, +B2=0 Dxz = 0, Dyz * 0, Mg * 0

xs*0, ys*0, B = B1+B2*0 Dxz * 0, Dyz 0, Mg z 0
Rys. 3.79._Wirnikniewyrównoważony B *Ó, Mb * Ó. Przypadek ogólny
Rys.^.78. Wirnik niewyrównoważony MB *0, niewyrównoważenie momentowe
206
Wyszukiwarka
Podobne podstrony:
24 luty 07 (91) a) b) J1 - moment bezwładności wirnika silnika oraz koła pasowego 1, J2 - moment bez
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (12) Zasada mocy chwilowych. Jeżeli mechanizm złożony z członów sztywnych połączonych ze
24 luty 07 (130) stądJkp ~ J* a> zr CO r 4k zr,i (P3.274) Ponieważ wał pośredni obraca się zwykle
24 luty 07 (131) Analiza wzoru (P3.275) wykazuje, że na wartość momentu bezwładności koła zamachoweg
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
24 luty 07 (146) Rozwiązujemy równanie różniczkowe przyjmując, że koniec rozruchu oznacza osiągnięci
24 luty 07 (153) W programie AKM można modelować grupę strukturalną w ten sposób, że będzie mieć pun
24 luty 07 (35) Współczynnik sprawności można wyznaczyć analitycznie, korzystając ze wzorów (3.51).
24 luty 07 (39) Na zakończenie należy zauważyć, że rozpatrywany model tarcia jest słuszny również dl
24 luty 07 (54) Rys. 3.74. Model fizyczny niewyrównoważonego wirnika w postaci cienkich niewyrównowa
24 luty 07 (57) Ścisłe spełnienie warunków wyrównoważenia dynamicznego wirnika na etapie konstruowan
24 luty 07 (58) Przykład 3.20 Dany jest wirnik o masie M obracający się wokół osi Oz z prędkością ką
24 luty 07 (84) Natomiast, jeśli otrzymamy Pzr(0 lub Mzr(0, to oznacza, że siła zredukowana jest sił
24 luty 07 (92) Obliczamy zredukowany moment sił na wał silnika: Mzri -(Oi =Ms-a>i + Ptf ■ vtt (P
24 luty 07 (98) Z zależności (3.134) wynika, że dla okresu ruchu ustalonego maszyny praca sił czynny
23 luty 07 (56) Kolejność postępowania w metodzie planów prędkości i przyspieszeń: 1. &n
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
więcej podobnych podstron