24 luty 07 (91)
a)
b)
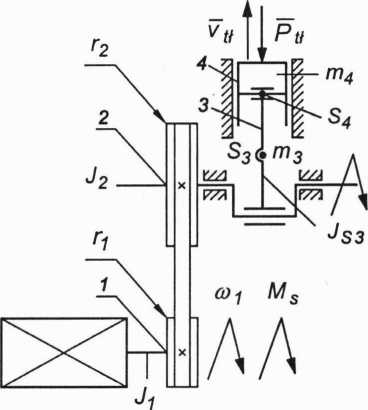
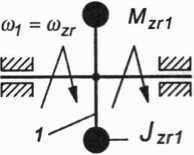
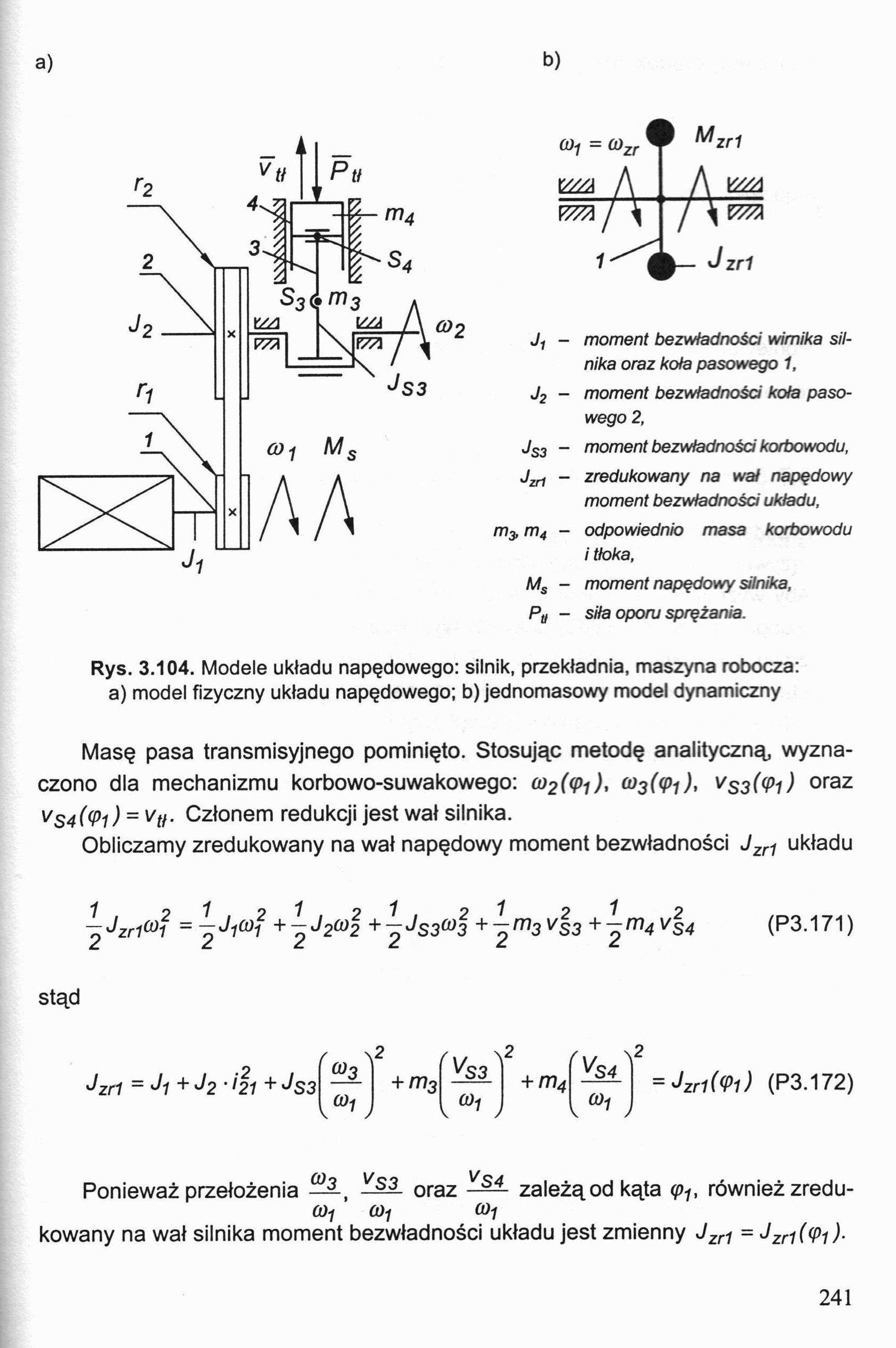
J1 - moment bezwładności wirnika silnika oraz koła pasowego 1,
J2 - moment bezwładności koła pasowego 2,
JS3 - moment bezwładności korbowodu, Jzń - zredukowany na wal napędowy moment bezwładności układu, m4 ~ odpowiednio masa korbowodu i tłoka,
Ms - moment napędowy silnika,
P„ - siła oporu sprężania.
Rys. 3.104. Modele układu napędowego: silnik, przekładnia, maszyna robocza: a) model fizyczny układu napędowego; b) jednomasowy model dynamiczny
Masę pasa transmisyjnego pominięto. Stosując metodę analityczną, wyznaczono dla mechanizmu korbowo-suwakowego: co2((Pi), (o3(ę-i), vS3((pi) oraz vS4((p1 ) = vtł- Członem redukcji jest wał silnika.
Obliczamy zredukowany na wał napędowy moment bezwładności Jzr1 układu
7 7 7 7 7 7
2JzrlUl =2 + 2 J2(°2 +2Js3C°3 + 2m3VS3 + 2m4VS4 (P3.171)
stąd
r(03^
CO-,
\ 1 /
+ m3
\2 'S3
0)4
V '
+ m4
(v \2 VS4
V®» J
= Jzrl((Pl) (P3.172)
Ponieważ przełożenia ^3. oraz zależą od kąta również zredu-
(01 (01 (o1
kowany na wał silnika moment bezwładności układu jest zmienny Jzr1 = Jzri((Pi )■
241
Wyszukiwarka
Podobne podstrony:
24 luty 07 (56) Założymy, że wał wirnika jest konstrukcyjnie i technologicznie wyrównoważo-ny. Stan
24 luty 07 (110) Obliczenie przyśpieszenia kątowego wału silnika (es(t) = e-i(t)) £t = ~~e T Jzrs (P
24 luty 07 (145) Ad c) W przypadku zmian obciążenia silnika w bardzo szerokich granicach należy doda
24 luty 07 (62) Rys. 3.84. Schemat dwucylindrowego silnika w układzie rzędowym Na podstawie (3.77) w
24 luty 07 (76) wektor przemieszczeń uogólnionych q(t) w funkcji czasu f oraz w funkcji zadanego wek
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
24 luty 07 (123) gdzie: Jzr - całkowity zredukowany moment bezwładności układu napędowego z kołem za
24 luty 07 (131) Analiza wzoru (P3.275) wykazuje, że na wartość momentu bezwładności koła zamachoweg
24 luty 07 (55) Rys. 3.75. Wektor główny sił bezwładności i moment główny sił bezwładności oraz równ
24 luty 07 (68) wzrosną wartości momentów bezwładności JS1 i JS2 członów 1 i 2, co spowoduje znaczny
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (138) ustalony trwa do momentu osiągnięcia nowego stanu równowagi. Na rysunku 3.132 jest
24 luty 07 (29) Przykład 3.16 Wyznaczyć reakcje w parach kinematycznych mechanizmu krzywkowego i mom
24 luty 07 (50) Do każdej z mas układu przyłożono siłę bezwładności B; o składowych normalnej B-1 =
24 luty 07 (54) Rys. 3.74. Model fizyczny niewyrównoważonego wirnika w postaci cienkich niewyrównowa
24 luty 07 (57) Ścisłe spełnienie warunków wyrównoważenia dynamicznego wirnika na etapie konstruowan
24 luty 07 (58) Przykład 3.20 Dany jest wirnik o masie M obracający się wokół osi Oz z prędkością ką
24 luty 07 (63) stąd współrzędne momentu wynoszą: mBx = Sm/y/z/ = 1=1d2D, yz dt‘ MBy =
więcej podobnych podstron