24 luty 07 (136)
Można wyróżnić cztery rodzaje teoretycznych charakterystyk silników.
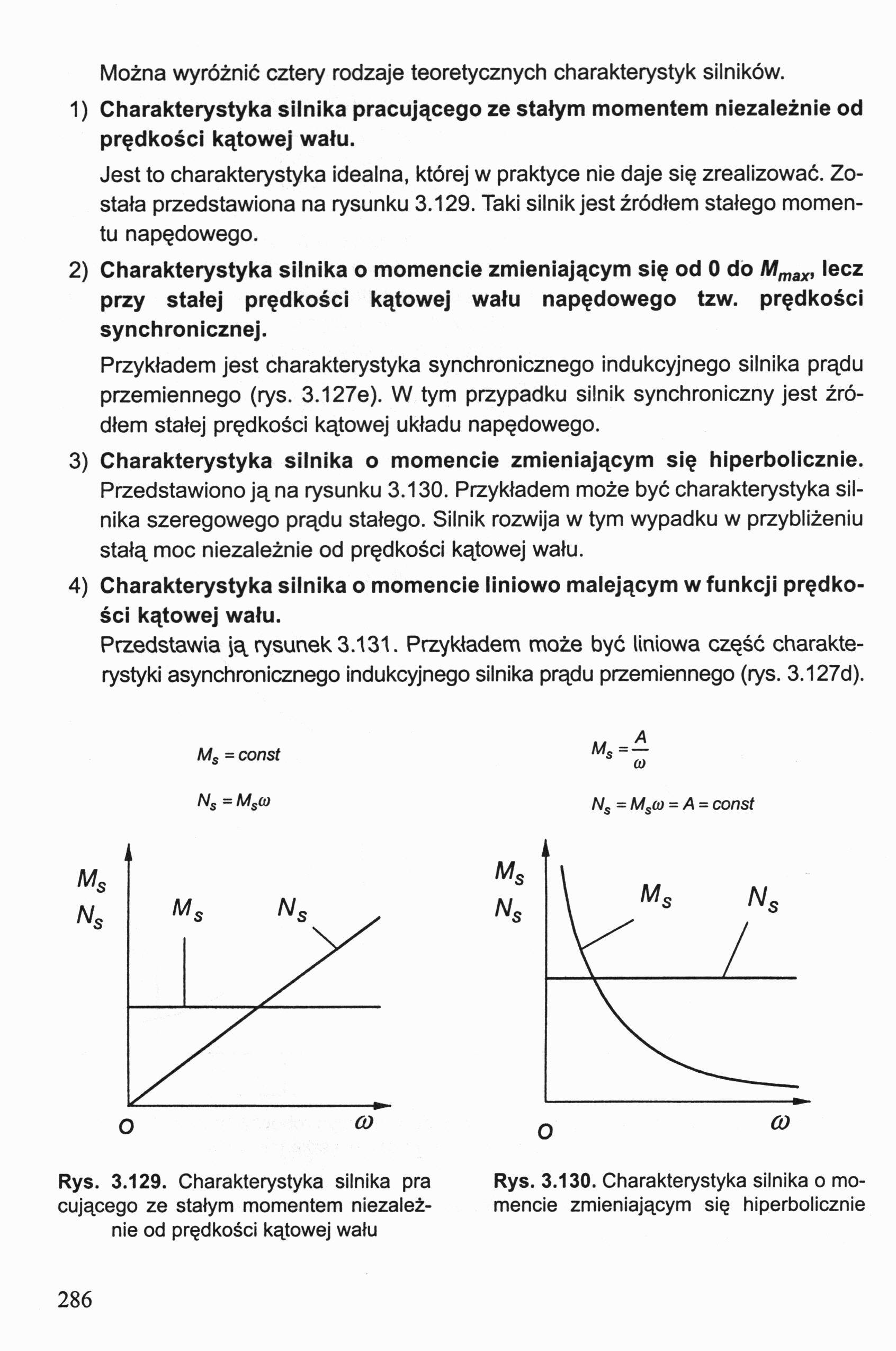
1) Charakterystyka silnika pracującego ze stałym momentem niezależnie od prędkości kątowej wału.
Jest to charakterystyka idealna, której w praktyce nie daje się zrealizować. Została przedstawiona na rysunku 3.129. Taki silnik jest źródłem stałego momentu napędowego.
2) Charakterystyka silnika o momencie zmieniającym się od 0 do Mmax, lecz przy stałej prędkości kątowej wału napędowego tzw. prędkości synchronicznej.
Przykładem jest charakterystyka synchronicznego indukcyjnego silnika prądu przemiennego (rys. 3.127e). W tym przypadku silnik synchroniczny jest źródłem stałej prędkości kątowej układu napędowego.
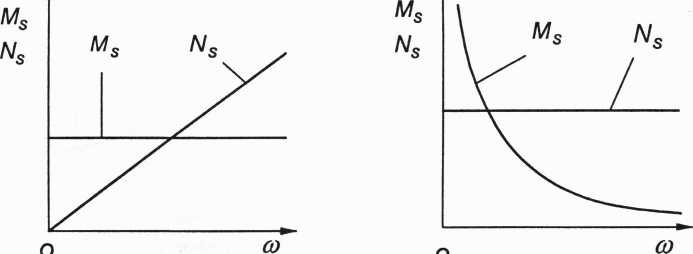
3) Charakterystyka silnika o momencie zmieniającym się hiperbolicznie. Przedstawiono ją na rysunku 3.130. Przykładem może być charakterystyka silnika szeregowego prądu stałego. Silnik rozwija w tym wypadku w przybliżeniu stałą moc niezależnie od prędkości kątowej wału.
4) Charakterystyka silnika o momencie liniowo malejącym w funkcji prędkości kątowej wału.
Przedstawia ją rysunek 3.131. Przykładem może być liniowa część charakterystyki asynchronicznego indukcyjnego silnika prądu przemiennego (rys. 3.127d).

Ms = const
Ns = Msoj
Ns = Msa> = A = const
O
O
Rys. 3.129. Charakterystyka silnika pra Rys. 3.130. Charakterystyka silnika o mocującego ze stałym momentem niezależ- mencie zmieniającym się hiperbolicznie
nie od prędkości kątowej wału
286
Wyszukiwarka
Podobne podstrony:
24 luty 07 (119) Można w ten sposób badać rozruch układu napędowego przyjmując zerowe warunki począt
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (144) Ad a) W zasadzie dąży się do stosowania silników wysokoobrotowych jako mniejszych i
24 luty 07 (92) Obliczamy zredukowany moment sił na wał silnika: Mzri -(Oi =Ms-a>i + Ptf ■ vtt (P
24 luty 07 (133) Do obliczeń można wykorzystać programy matematyczne np. program MATLAB lub arkusz k
24 luty 07 (134) Układy napędowe różnią się ponadto od siebie rodzajem energii przetwarzanej w silni
24 luty 07 (139) Sterowanie parametrami kinematycznymi układu napędowego można przeprowadzać różnymi
24 luty 07 (153) W programie AKM można modelować grupę strukturalną w ten sposób, że będzie mieć pun
24 luty 07 (35) Współczynnik sprawności można wyznaczyć analitycznie, korzystając ze wzorów (3.51).
24 luty 07 (48) Maszyny o dużych wymiarach, ciężkie, trudne do demontażu można wyważać w trakcie eks
Rodzaje komunikacji elektronicznej Patrząc od strony nadawcy, można wyróżnić cztery typy komunikowan
Kształt kości jest bardzo zróżnicowany. Można wyróżnić cztery ich rodzaje: 1. kości płaskie -
Image017 W przekroju poprzecznym struktury układu scalonego (rys. 1.13) można wyróżnić cztery warstw
Slajd58 Ze względu na zakres częstotliwości można rozróżnić cztery rodzaje tych fal: *
MODELE RYNKU W gospodarce rynkowej można wyróżnić cztery podstawowe modele struktur rynkowych Są nim
W historii budownictwa i w obecnej praktyce można wyróżnić cztery podstawowe typy technologii budowa
więcej podobnych podstron