24 luty 07 (99)
stąd po rozdzieleniu zmiennych
(O > t
jdco = — j[Mc(t)-Mb(t)]dt (3.141)
OJ0 zr t0
lub
1 t
tD=a>o + — j[Mc(t)-Mb(t)'\0t (3.142)
Jzrt0
Przypadek D
Analityczne scałkowanie równań ruchu nie nastręcza również żadnych problemów w przypadku D, gdy Mc - const, Mb = const oraz Jzr = const.
W innych bardziej ogólnych przypadkach rozwiązanie równań dynamicznych ruchu wymaga na ogół stosowania metod numerycznych.
Obecnie przedstawimy przykłady całkowania równań ruchu maszyny metodami analitycznymi.
Przykład 3.30
Wyznaczyć przebieg prędkości kątowej oraz przyspieszenia kątowego wału silnika dla układu napędowego: silnik - przekładnia pasowa - piła tarczowa z Przykładu 3.28 (rys. 3.101 i 3.102) w okresie rozruchu bez obciążenia oraz podczas przecinania materiału. Warunki początkowe dla okresu rozruchu: t = 0, (Pi (o) = 0, (p-i (0)= 0. Silnik napędowy jest asynchronicznym indukcyjnym silnikiem prądu przemiennego.
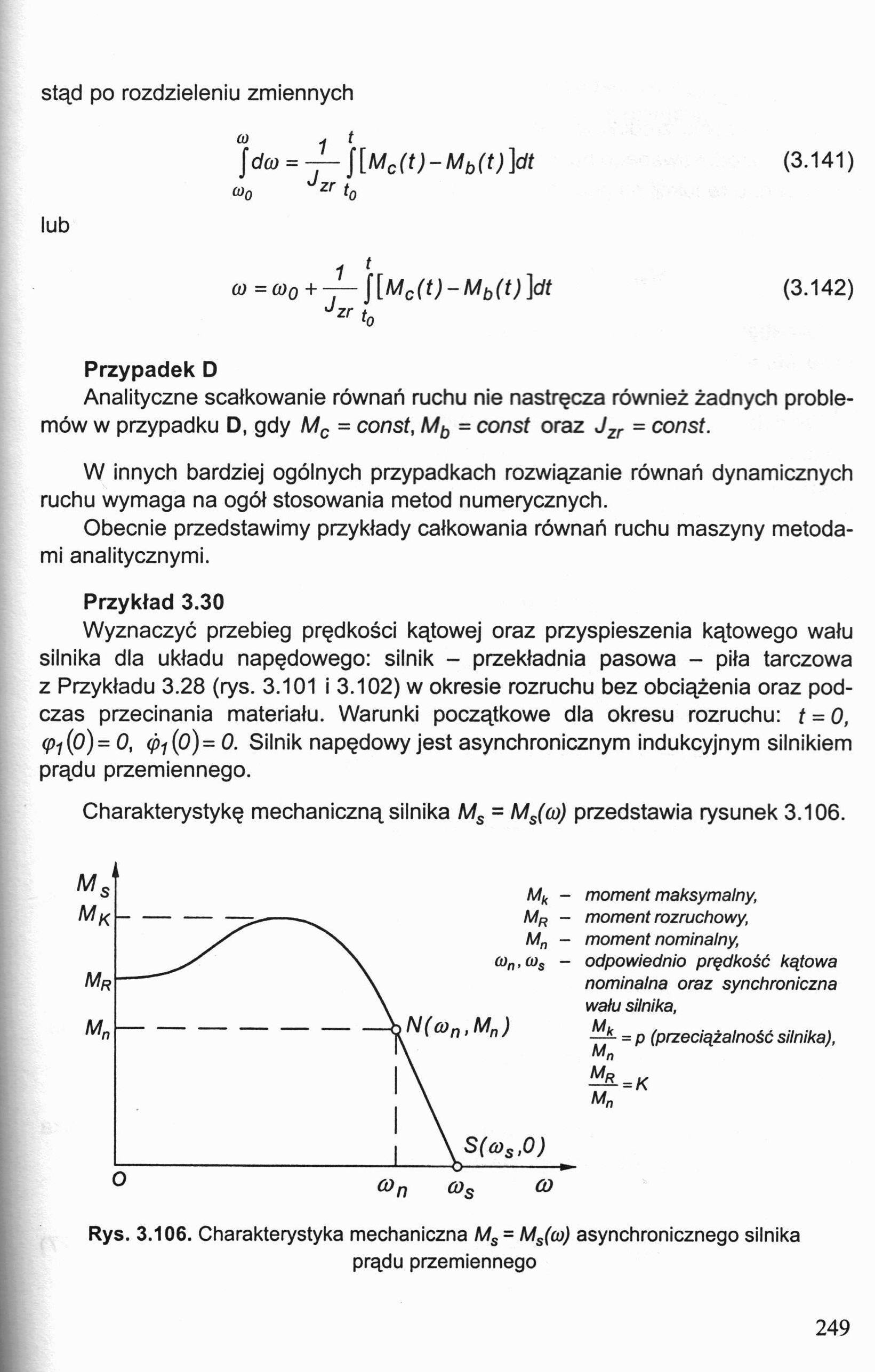
Charakterystykę mechaniczną silnika Ms = Ms(a>) przedstawia rysunek 3.106.

moment maksymalny, moment rozruchowy, moment nominalny, odpowiednio prędkość kątowa nominalna oraz synchroniczna walu silnika,
— = p (przeciążalność silnika), Mn
Mr
Mn
= K
Rys. 3.106. Charakterystyka mechaniczna Ms = Ms(co) asynchronicznego silnika
prądu przemiennego
249
Wyszukiwarka
Podobne podstrony:
Image46 (13) 90 Stąd po rozdzieleniu zmiennych i scałkowaniu, otrzymujemy 90 t i po przekształceniac
Image46 90 Stąd po rozdzieleniu zmiennych i scałkowaniu, otrzymujemy 90 b m t ln b m V o X + x2
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (117) stąd lub ogólnie co(A(p) = co(0) + Atp ■ f(0, to(0)) U>i+1
24 luty 07 (63) stąd współrzędne momentu wynoszą: mBx = Sm/y/z/ = 1=1d2D, yz dt‘ MBy =
24 luty 07 (67) stąd (P3.134) Si(2 = mk2rk2 - m2s2 + 1713^2 ~ O gdzie sk2 - moment statyczny przeciw
24 luty 07 (103) Po czasie t2 = 3T prędkość kątowa osiąga 95% wartości ustalonej coust w drugim etap
24 luty 07 (65) W trakcie ruchu niewyrównoważonego mechanizmu środek masy porusza się po torze o wsp
24 luty 07 (71) ruch postępowy masa mc = m3 + m2c pozostaje niewyrównoważona i dlatego środek masy m
24 luty 07 (83) Po wprowadzeniu oznaczeń równanie (3.98) dla członu redukcji wykonującego ruch postę
24 luty 07 (88) lecz na podstawie (P3.162) mamy 2^ł _ ^ xA a stąd oraz xD _ d xA a’ (P3.164) W celu
freakpp020 38 Po rozdzieleniu zmiennych i scałkowaniu otrzymuje się: (2.4) Qln— _rl (Twi -Tw2)2tiL g
23 luty 07 (99) Na rysunkach 2.41 i 2.42 pokazano schemat konstrukcyjny jednorzędowej przekładni obi
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (101) Drugą część zlinearyzowanej charakterystyki przedstawia odcinek BS prostej przechod
24 luty 07 (102) Etap 2 Rozruch układu bez obciążenia, Mb = 0, przy malejącym liniowo momencie napęd
24 luty 07 (104) Prędkość kątową a>p w ruchu ustalonym podczas przecinania znajdziemy z zależnośc
więcej podobnych podstron