mechanika77
|
przy czym: — rys. 2.23a |
«l = «A+*<> |
«2 * «A “ ^ |
<a* > <0 |
<2.5*1) |
|
- rys. 2.23b |
= «A+«<> |
II 1 |
O V < |
(2.60) |
|
2.1.4. KINEMATYKA CIAŁA SZTYWNEGO W RUCHU KULISTYM | ||||
Mtyspić s zen i e k ątowe
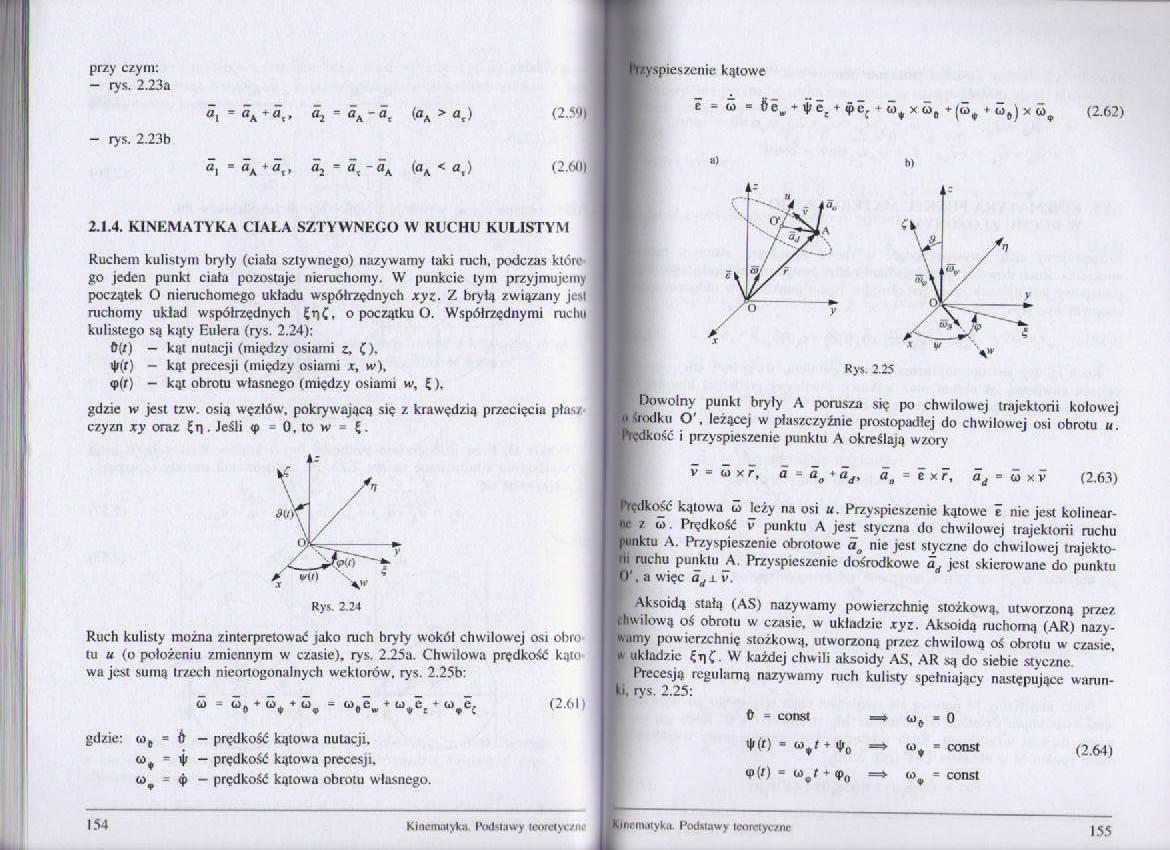
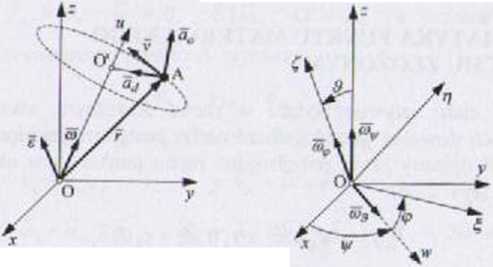
Ruchem kulistym bryły (ciała sztywnego) nazywamy taki ruch. podczas któro go jeden punkt ciała pozostaje nieruchomy. W punkcie tym przyjmujemy I początek O nieruchomego układu współrzędnych xyz. Z bry łą związany jesi 1 ruchomy układ współrzędnych £tić, o początku O. Współrzędnymi ruchu kulistego są kąty Eulera (rys. 2.24):
©(/) - kąt nutacji (między osiami z. ().
\p(r) - kąt precesji (między osiami x, w),
<p(r) - kąt obrotu własnego (między osiami w, £ ),
gdzie w jest tzw. osią węzłów, pokrywającą się z krawędzią przecięcia płasz czyzn xy oraz . Jeśli <p = 0. to w = £.
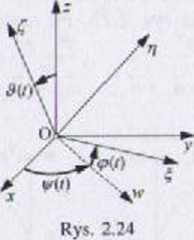
Ruch kulisty można zinterpretować jako ruch bryły wokół chwilowej osi obro tu u (o położeniu zmiennym w- czasie), rys. 2.25a. Chwilowa prędkość kątowa jest sumą trzech nieorlogonalnych wektorów, rys. 2.25b:
<3 = ♦ lj ^ = u)#ew + ia%e. ♦ <a^ec (2.61)
gdzie: toe = 6 — prędkość kątowa nutacji.
= ip — prędkość kątowa precesji. o>T = (p - prędkość kątowa obrotu własnego.
(2.62)
Rys. 2.25
[ Dowolny punkt bryły A porusza się po chwilowej trajektorii kołowej " środku O', leżącej w płaszczyźnie prostopadłej do chwilowej osi obrotu u. Prędkość i przyspieszenie punktu A określają wzory
v = w x r. a = a9+ aJt aa = e x r, ad - w x v (2.63)
prędkość kątowa u> jeży na osi u. Przyspieszenie kątowe e nic jest kolinear-m- / ń>. Prędkość v punktu A jest styczna do chwilowej trajektorii ruchu punktu A. Przyspieszenie obrotowe aQ nie jest styczne do chwilowej trajekto-;fn ruchu punktu A. Przyspieszenie dośrodkowe ad jest skierowane do punktu • l'. a więc ad ± v.
Aksoidą stałą (AS) nazywamy powierzchnię stożkową, utworzoną prze/ Chwilową oś obrotu w czasie, w układzie xyz. Aksoidą ruchomą (AR) nazywamy powierzchnię stożkową, utworzoną przez chwilową oś obrotu w czasie, w układzie W każdej chwili aksoidy AS, AR są do siebie styczne
Precesją regularną nazywamy ruch kulisty spełniający następujące warun-Iti. rys. 2.25:
|
0 = const |
-* |
“o |
- 0 | |
|
♦ (0 3 <*V + |
=> |
= const |
(2.64) | |
|
«P<0 " <V + <p0 |
= const |
154
Kinematyka. hniMawy teorii y./iw i (Onematyka. Pochtawy Icomyc/nc
155
Wyszukiwarka
Podobne podstrony:
Image64 (7) 126 126 I 2.84. Posłużymy się zasadą zachowania energii mechanicznej, przy czym ene
Image64 (7) 126 126 I 2.84. Posłużymy się zasadą zachowania energii mechanicznej, przy czym ene
Image64 126 126 T 2.84. Posłużymy się zasadą zachowania energii mechanicznej, przy czym energię
Image64 (7) 126 126 I 2.84. Posłużymy się zasadą zachowania energii mechanicznej, przy czym ene
DSCN0507 (Large) Charakterystyki mechaniczne przy czym fJ *= P„+fł, - całkowity względny współczynni
59146 tq68?16 (2) * =fl l¥ w 4 ; » * *} 1* * 4: » f* 4 4 ♦ ł łi 4 * #1 i* * 4 » *
na imieniny Spotkaj w dniu swoich Imienin zkta rybkę, Ig wszelkie pragni R • * i j*^łj v.ltr<^ł¥^
W — AZi = Afnn-ch 4- A L{crm 4- A Ev:w
skanuj0375 (2) (rys. 14.12c, d), przy czym kąty oznaczone symbolem W muszą być sobie równe, a widełk
skanuj0469 przy czym 2—(A<o)2 —(Azl)2 COSW = -V — 2
Wózki dwuosiowe Do analiz i badań przyjęto modele jak dla wózków jednoosiowych (rys. 1+4), przy czym
skanuj0010 (342) -vr■a Odp. gem- je kodujące wykazują znaczny polimorfizm (wacie; odmian allclicznyc
więcej podobnych podstron