mechanika16
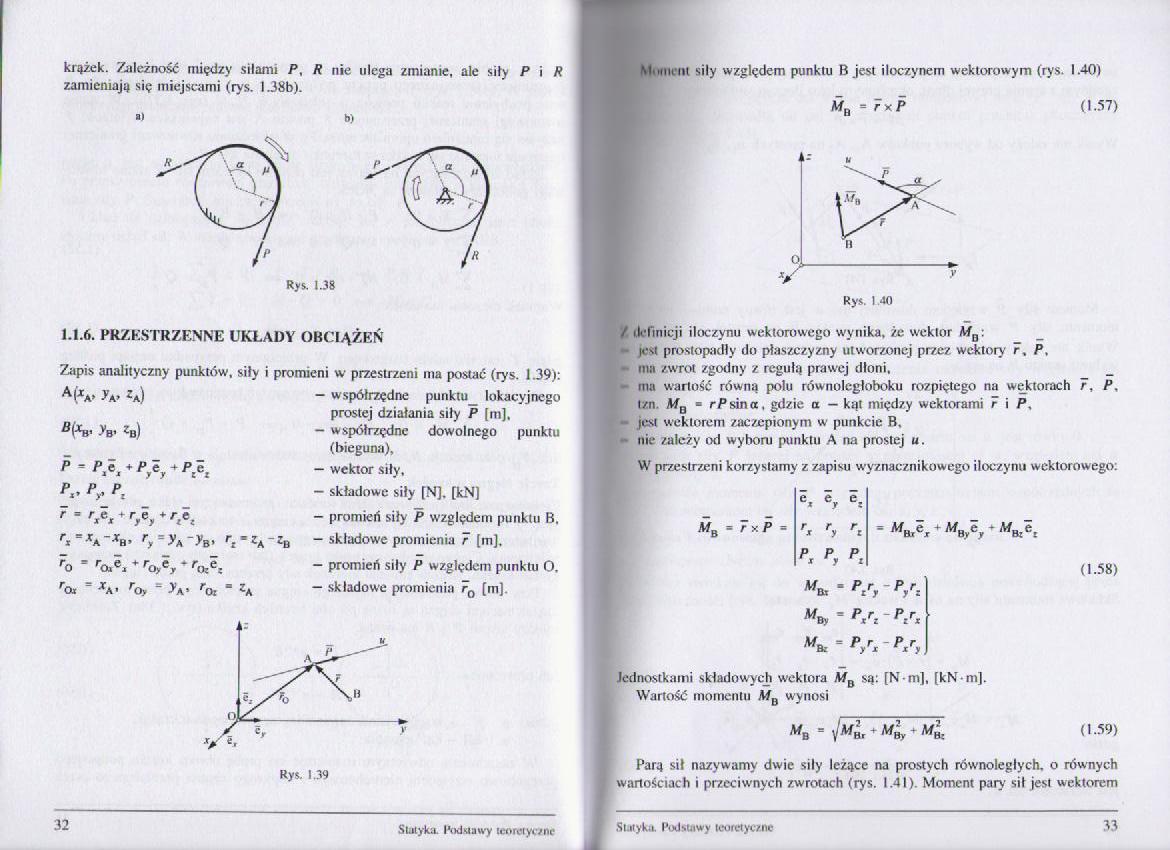
krążek. Zależność między silami P, R nie ulega zmianie, ale siły P i R zamieniają się miejscami (rys. I.38b).
i) b)
Rys. 1.38
|
1.1.6. PRZESTRZENNE UKŁADY OBCIĄŻEŃ | |
|
Zapis analityczny punktów, siły i |
promieni w przestrzeni ma postać (rys. 1.39): |
|
A(xa> Za> za) |
- współrzędne punktu lokacyjnego prostej działania siły P (m]. |
|
-VB’ zb) |
— współrzędne dowolnego punktu |
|
(bieguna), | |
|
P = Ptet * Pyty + P£ex |
— wektor siły. |
|
pr p r |
- składowe siły [N], [kN] |
|
7 m |
- promień siły P względem punktu B, |
|
rx=xA-^rB, ry=yA-yB, rt-zA |
-zB - składowe promienia 7 (m). |
|
7o m * ro>«, * roĆz |
— promień siły P względem punktu 0. |
|
rOi VA' rO> = ^A’ rOi ~ ZK |
— składowe promienia rQ [mj. |
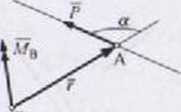
Mdint iii siły względem punktu B jest iloczynem wektorowym (rys. 1.40)
(1.57)
Mb = 7xP
u
H

y
Rys. 1 40
/ definicji iloczynu wektorowego wynika, żc wektor MQ:
iest prostopadły do płaszczyzny utworzonej przez wektory r, P.
- ma zwrot zgodny z regułą prawej dłoni.
ma wartość równą polu równoległoboku rozpiętego na wektorach r, P, izn. Mq - rPsina, gdzie a - kąt między wektorami r i P,
- jesi wektorem zaczepionym w punkcie B, nie zależy od wyboru punktu A na prostej u.
W przestrzeni korzystamy z zapisu wyznacznikowego iloczynu wektorowego:
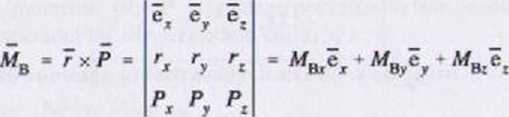
(1.58)
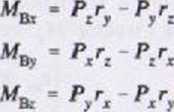
Jednostkami składowych wektora MB są: [N m], (kN-m]. Wartość momentu MB wynosi

(1.59)
Parą sił nazywamy dwie siły lezące na prostych równoległych, o równych wartościach i przeciwnych zwrotach (rys. 1.41). Moment pary sił jest wektorem
Smyku. Podstawy teoretyczne
32
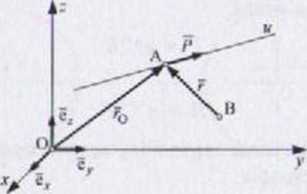
Rys. 1.39
Statyka. Podstawy teoretyczne
Wyszukiwarka
Podobne podstrony:
DSC04295 (2) Gdy sytuacja w miejscu pracy nie ulega zmianie, z czasem może pojawić się także apatia,
P1040342 (2) U idzi dorosłych szczupłych ilość adipocytów nie ulega zmianie. Wraz z postępującym sta
Image512 emiterowego RE. Po przełączeniu na wyjściu układu pojawia się sygnał 1, przy czym sygnał te
skanowanie0040 2 140 1) rodzaj produktów i/lub usług w dłuższym czasie nie ulega z
Prezentacja wyników pomiaru Zaokrąglanie: ostatnia cyfra nie ulega zmianie, jeśli cyfrą następną jes
stanu nie ulega zmianie. Rozważmy to na przykładzie. Gaz doskonały w stanie początkowym A jest okreś
DSC03973 ANTRNY PROSTOLINIOWE pólfalowego nie ulega zmianie przy przesuwaniu punktu zasilania. W prz
0000088 (4) stanu nie ulega zmianie. Rozważmy to na przykładzie. Gaz doskonały w stanie początkowym
• sytuacja prawna dłużnika nie ulega zmianie w następstwie cesji, z tym tylko
IMAG0072 ładunków dodatnich i ujemnych) nie ulega zmianie. Ładunek może jedynie przemieszczać się z
Image512 emiterowego RE. Po przełączeniu na wyjściu układu pojawia się sygnał 1, przy czym sygnał te
3) jeżeli pierwsza odrzucona cyfra jest równa 5 - ostatnia zachowana cyfra nie ulega zmianie jeśli j
DSC02828 ch bierny-***&*£?** ^Ę amicznej przewodu nie ulega zmianie *kfój przepływowy i głębokoś
więcej podobnych podstron