mechanika20
Ad 1. Redukcja układu do wypadkowej
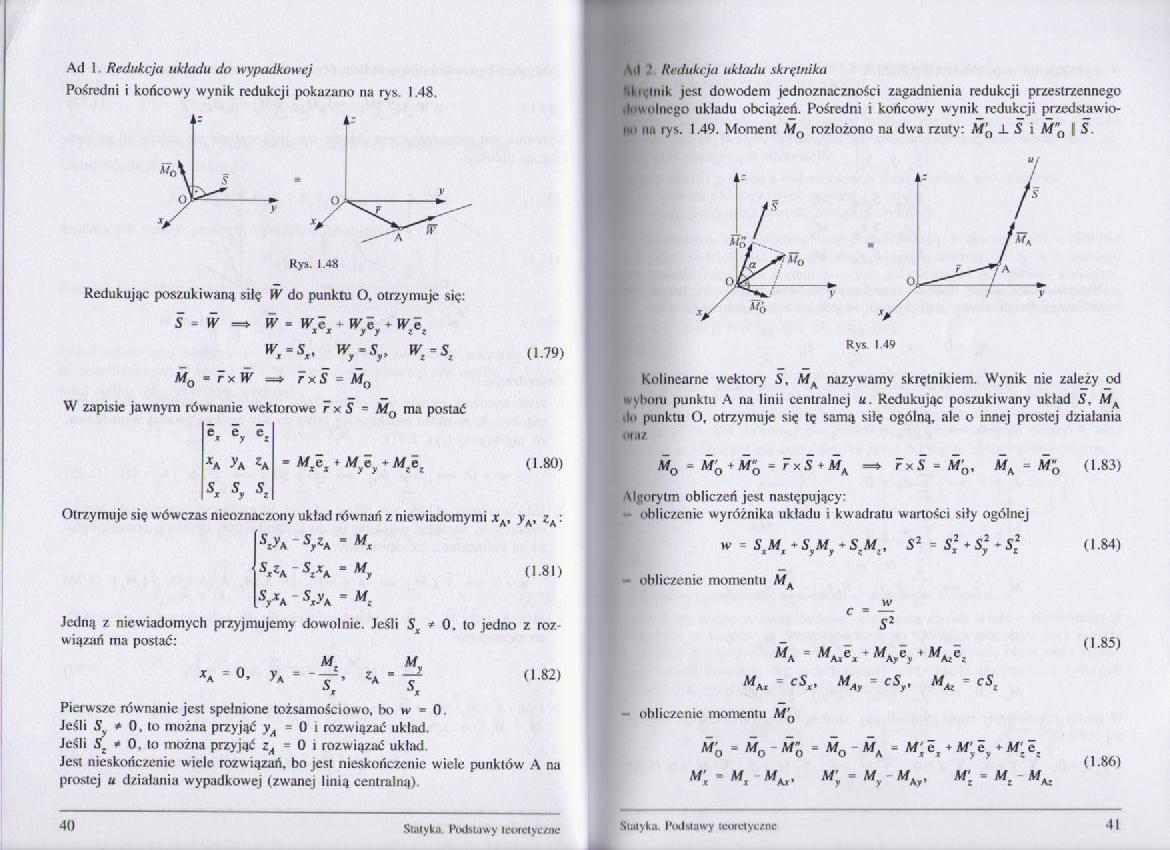
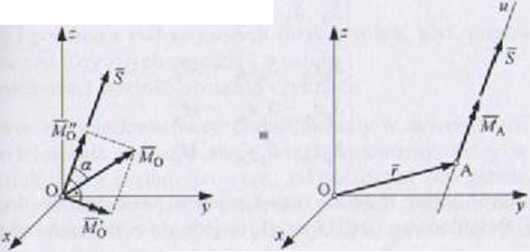
Pośredni i końcowy wynik redukcji pokazano na rys. 1.48.

Rys. I.4X
Redukuje poszukiwaną silę W do punktu O. otrzymuje się: 5 = W =* W - Wxlx + Wyly ♦ W,et
(1.79)
K-sx. wrsy>
Mr
rxS = M,
‘o , „ ^ M „MQ
W zapisie jawnym równanie wektorowe r x S = Af0 ma postać
c* ey e<
xa yA Za
S* S, sz
- Mxex ♦ Myey * Mges
(1.80)
Otrzymuje się wówczas nieoznaczony układ równań z niewiadomymi .tA, yA, zA:
V* - Va * M«
Sx«a-Va-m, U 81)
k*A Va -
Jedną z niewiadomych przyjmujemy dowolnie. Jeśli SA * 0. to jedno z rozwiązań ma postać:
M. Af,
1 ?a = -«*• *A ' T2 U.82)
5jr
Pierwsze równanie jest spełnione tożsamościowe, bo w =0.
Jeśli S. + 0. to można przyjąć yA 0 i rozwiązać układ.
Jeśli S. * 0. to można przyjąć zA = 0 i rozwiązać układ
Jest nieskończenie wiele rozwiązań, bo jest nieskończenie wiele punktów A na
prostej u działania wypadkowej (zwanej linią centralną).
40
Statyka. Podstawy icotciycznc
Ad ' Redukcja układu skrętnika
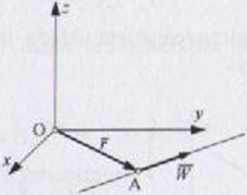
M.jmk jest dowodem jednoznaczności zagadnienia redukcji przestrzennego d<rolnego układu obciążeń. Pośredni i końcowy wynik redukcji przedstawiono nu rys. 1.49. Moment MQ rozłożono na dwa rzuty: M'a ± S i M"0 | S.
Rys 1.49
Kolincarnc wektory' S, MA nazywamy skrętnikiem. Wynik nie zalezy od iwsbom punktu A na linii centralnej u. Redukując poszukiwany układ S. MA do punktu O, otrzymuje się tę samą siłę ogólną, ale o innej prostej działania oraz
MG = M'0 + = 7x5 ♦ Ma =s rx5 = M'0, MK = M"0 (1.83)
Mgorytm obliczeń jest następujący:
- obliczenie wyróżnika układu i kwadratu wartości siły ogólnej
»• = S.jW, - SyJWr * StMt. s2 - s; * s2 - s2
(1.84)
- obliczenie momentu MA
c
w S2
(1.85)
M
cS,. M* “ cSz
- obliczenie momentu
o
"o - «o - *ó - «0 - "* - m;s, *
- M, - ", MAł, - M.
(1.86)
Statyka. INulMuwy tcoictyi/nc
dl
Wyszukiwarka
Podobne podstrony:
mechanika14 Przykład układu GN, zbudowanego według zasady 3. zastosowanej trzykrotnie, pokazano na r
HWScan00246 Przykładem rozwiązania układu zabezpieczającego przed utratą stateczności jest koparka p
Kieninki i zwroty lokalnych osi dla końców przedziałów charakterystycznych pokazano na rys 2. Rys.2
Mechanika ogolna0082 1’r/ykł.ul 211 Dany jest mccliani/m plaski pokazany na rys. 101 Nu bryłę I meel
DSCN0915 2 I. Podaj definicję wypadkowej układu sił oraz WKW redukcji układu do wypadkowej. Czy poda
Mechanika ogolna0056 112Przykład 15 Opisać zjawisko ruchu układu pokazanego na rys. 65, stosując zas
Mechanika ogolna0068 136Przykład 19 Dla układu mechanicznego pokazanego na rys. 79 określić równowag
Strona0060 602.8. Drgania wymuszone tłumione Rozpatrzymy teraz drgania układu mechanicznego pokazane
DSC02971 pokazano na rys. 4. Soczewka projekcyjna służy do dalszego powiększania obrazu oraz do twor
Image0110 (2) Możesz powiększyć drzewo, przesuwając wnętrze pnia do góry. Uformuj końcówki liści, pr
Image0110 (2) Możesz powiększyć drzewo, przesuwając wnętrze pnia do góry. Uformuj końcówki liści, pr
DSC01587 (6) n Hp zwierane są zaciski 3 14 układu do modulacji jaskrawości, wytwa-Hp£ on na wyjściu
Image0110 (2) Możesz powiększyć drzewo, przesuwając wnętrze pnia do góry. Uformuj końcówki liści, pr
więcej podobnych podstron