PAGE69
Mechanizmy pctckcwe w wykonaniu rozkazów
AMDAHL 470V/6
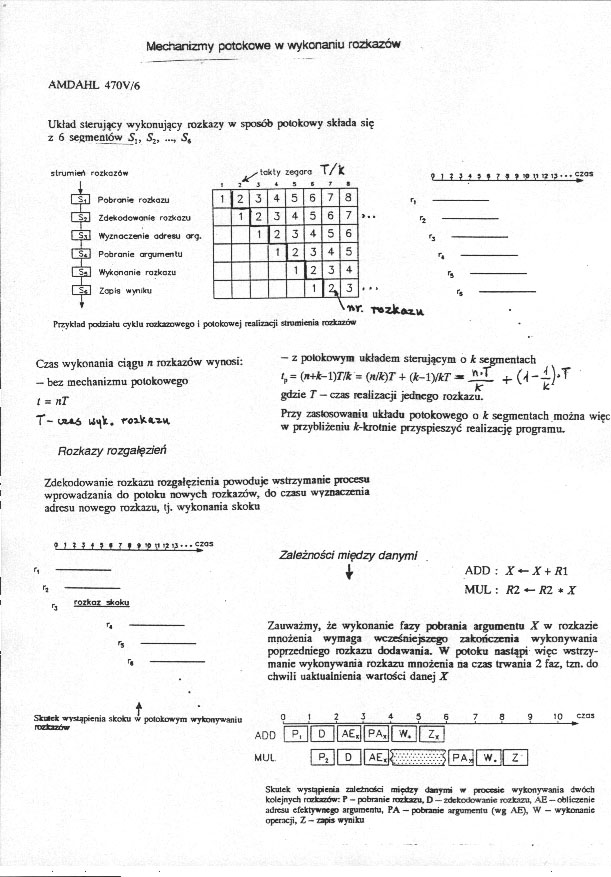
Układ sterujący wykonujący rozkazy w sposób potokowy składa się z 6 segmentów 5., Sz, ..., 5*
strumieó rozkozów

Pobronie rozkozu Zdł*cxl0»0f'i« roZkOZU Wyznoczenie odf«su orq. Pobranie or gum en (U Wykonanie rozkazu Zccte wyniku
* Sekty z®q<jro r/k
I ! 3 « i » ' ■
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
a |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 | |
|
1 |
2 |
3 |
4 |
5 |
6 | ||
|
I |
2 |
3 |
4 |
5 | |||
|
1 |
2 |
3 |
4 | ||||
|
1 |
A |
3 |
r.
Przykład podziału cyklu rozkazowego i potokowej realizacji strumienia rozkazów
'W* T^lkdLŁU
Czas wykonania ciągu n rozkazów wynosi: z potokowym układem sterującym o k segmentach
- bez mechanizmu potokowego l?= (n+*“ W* 3 (nik)T + (k-l)/kT -* +- “ —)ł^~
t _ „j- g^e ^ - czas realizacji jednego rozkazu.
T- uł*ó ułuk r©xWo.w. Prz^ zaskxsowan*u układu potokowego o k segmentach można wiec
• * w przybliżeniu fc-krotnie przyspieszyć realizację programu.
Rozkazy rozgałęzień
Zdclcndowanie rozkazu rozgałęzienia powoduje wstrzymanie procesu wprowadzania do potoku nowych rozkazów, do czasu wyznaczenia adresu nowego rozkazu, tj. wykonania skoku
» m m ? uayiił— yq3
r, -
r, -
rj *<*“ U
r5
rł
Zależności między danymi
I
ADD : X — X + R\ MUL : R2 *- R2 * X
Zauważmy, że wykonanie fazy pobrania argumentu X w rozkazie mnożenia wymaga wcześniejszego zakończenia wykonywania poprzedniego rozkazu dodawania. W potoku nastąpi więc wstrzymanie wykonywania rozkazu mnożenia na czas trwania 2 faz, tzn. do chwili uaktualnienia wartości danej X
Sktack wvsujp*enia skoku w polekowym wykonywaniu rozkazów
10 czas
O j 23436 78?
ADD mrP~l|A£,HPA,|| II Z,!
|
1 pj II o ||ae.|^: :::x |
Skutek wystąpienia zależności między danymi w procesie wykonywania dwóch kolejnych rozkazów: P - pobranie rozkazu. D — zdekodowanie rozkazu, AE — obliczenie adresu efektywnego argumentu, PA — pobranie argumentu (wg AE), W — wykonanie operacji, Z - zapis wyniku
Wyszukiwarka
Podobne podstrony:
•Model prostego procesora (i8080) ;azu
img204 204 Q *FSK^ UKŁAD STERUJĄCY1 X(t) Rys. 1.80. Kluczowanie częstotliwości FSK z ciągłą fazę: a)
instalacje149 6. BADANIA SILNIKÓW SKOKOWYCH 178 Układ sterujący zadawaniem momentu oporowego
jswp00005 Wykonanie rozkazu „stój", bez użycia smyczy Nauka pokonywania przeszkody, gdy pies je
jswp00005 Wykonanie rozkazu „stój”, bez użycia smyczy Nauka pokonywania przeszkody, gdy pies jest op
HPIM7625 PROGRAM OBALANA UKŁAD STERUJĄCY SYGNALIZACJAt INFORMACJE ENERGIA MATERIAŁ OBRABIANY MATERIA
napędy i sterowanie Część mechaniczną projektu wykonano z powszechnie dostępnych materiałów,
Sprawca działający na rozkaz przestępstwa nie popełnia jeżeli jego czyn jest wykonaniem rozkazu, ale
56 Cykle wykonania rozkazów Bezadresowe • C2q7pt3 MBRj! i-ty rozkaz bezadresowy NEGA • C2q7pt3
5a (42) 01. Zasady mechaniki (prawa Newtona). I prawo Newtona: Układ sił pozostają
Mikroprocesor Mikroprocesor to układ cyfrowy wykonany jako pojedynczy układ scalony o wielkim stopni
więcej podobnych podstron