instalacje149
6. BADANIA SILNIKÓW SKOKOWYCH 178
Układ sterujący zadawaniem momentu oporowego biernego
Wybieranie
dodatkowego
momentu
bezwładności
Moment
oporowy
bierny
Dodatkowy
moment
bezwładn.
Wybieranie
programu
badania
Klawiaturo —
Monitor
Przetwornik położenia kątowego
L
Mikro -komputer (master)
TT
<!=£> Wirnik
O
Piezoelektr
przetwornik
siły
|
c M por |
oduł miarowy | |
|
% |
% |
% |
Pamięć
masowa
Stojan
Drukarka
Ploter
Wzmacniacz
ładunkowy
|
Pon prą |
ii ar du |
|
_*_ | |
|
Ponr napi |
iai ęcia |
U kanały)
U kanały)
|
<\ |
Sterownik silnika | |
|
(mikrokomputer s!ave) |
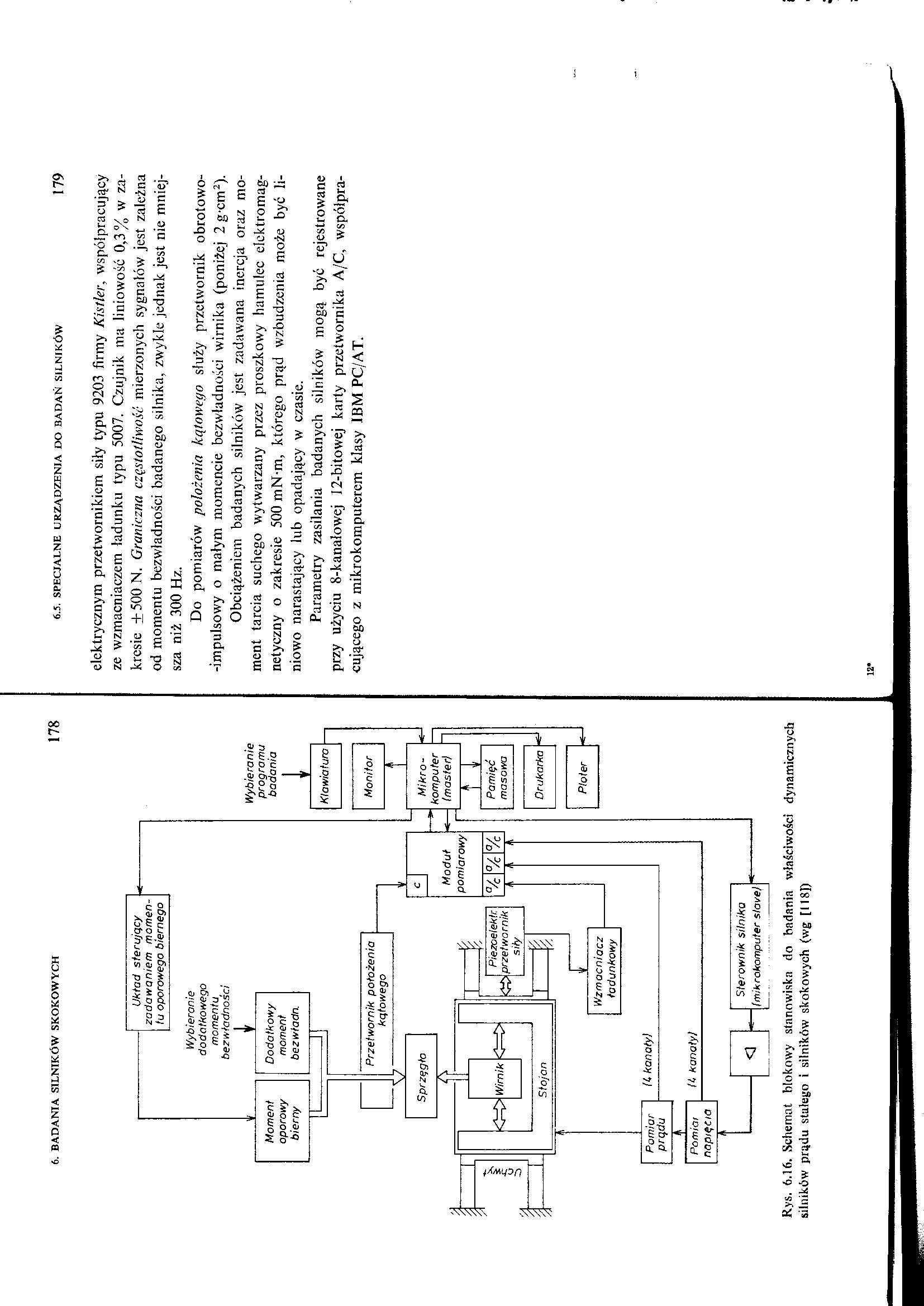
Rys. 6.16. Schemat blokowy stanowiska do badania właściwości dynamicznych silników prądu stałego i silników skokowych (wg [USD
elektrycznym przetwornikiem siły typu 9203 firmy Kistler, współpracujący ze wzmacniaczem ładunku typu 5007. Czujnik ma liniowość 0,3% w zakresie + 500 N. Graniczna częstotliwość mierzonych sygnałów jest zależna od momentu bezwładności badanego silnika, zwykle jednak jest nie mniejsza niż 300 Hz.
Do pomiarów położenia kątowego służy przetwornik obrotowo--impulsowy o małym momencie bezwładności wirnika (poniżej 2 gem2).
Obciążeniem badanych silników jest zadawana inercja oraz moment tarcia suchego wytwarzany przez proszkowy hamulec elektromagnetyczny o zakresie 500 mN*m, którego prąd wzbudzenia może być liniowo narastający lub opadający w czasie.
Parametry zasilania badanych silników mogą być rejestrowane przy użyciu 8-kanałowej J2-bitowej karty przetwornika A/C, współpracującego z mikrokomputerem klasy IBM PC/AT.
12*
Wyszukiwarka
Podobne podstrony:
instalacje143 6. BADANIA SILNIKÓW SKOKOWYCH 166 Rys. 6.10. Układ do zdejmowania charakterystyki gran
instalacje139 6. BADANIA SILNIKÓW SKOKOWYCH 158 — znamionowy kąt skoku as silnika
instalacje142 6. BADANIA SILNIKÓW SKOKOWYCH 164 żenie wirnika. Można zaobserwować, że charakterystyk
instalacje144 6. BADANIA SILNIKÓW SKOKOWYCH 168 była niedoskonałość sprzęgła, które nie zapewniało t
instalacje145 6. BADANIA SILNIKÓW SKOKOWYCH 170 Rys. 6.13. Odpowiedź silnika FA-34-4-1 na skok jedno
instalacje148 6. BADANIA SILNIKÓW SKOKOWYCH 176 Pomiar kąta można zastąpić pomiarem czasu obrotu. Wt
instalacje141 6. BADANIA SILNIKÓW SKOKOWYCH 162 momentów (0-=-7,5 oraz 0-=-15 N* cm). Dokładność pom
instalacje146 6. BADANIA SILNIKÓW SKOKOWYCH 172 Zatem, moment bezwładności wirnika silnika skokowego
60323 instalacje140 6. BADANIA SILNIKÓW SKOKOWYCH 160 Pomiaru momentu dokonuje się za pomocą ciężark
instalacje147 6. BADANIA SILNIKÓW SKOKOWYCH 174 Uzyskuje się zależność wiążącą moment silnika skokow
więcej podobnych podstron