instalacje144
6. BADANIA SILNIKÓW SKOKOWYCH 168
była niedoskonałość sprzęgła, które nie zapewniało tłumienia drgań wirnika.
Duży wpływ na przebieg charakterystyk częstotliwościowych ma luz w sprzęgle, co ilustruje rys. 6.1 Ib, na którym porównano charakterystykę przy połączeniu ze szczeliną 3 i przy sztywnym sprzęgnięciu 4.
Przy połączeniu na sztywno (krzywa 4), pod wpływem drgań własnych, przy częstotliwości ok. 140 Hz występują głębokie luki w krzywej momentu, natomiast przy częstotliwości ok. 1300 Hz moment staje się równy zeru. Przy sprzęgle ze szczeliną wyrwa w krzywej momentu powstaje przy małych częstotliwościach. Przy częstotliwościach 160 i 220 Hz badany silnik pracuje niestabilnie pod obciążeniem.
6.3.3. Wyznaczanie charakterystyki nawrotu
Pomiary wykonuje się tak samo, jak przy wyznaczaniu charakterystyki rozruchowej, z tym tylko, że na dozowniku impulsów o dwu torach wyjściowych nastawia się dwie serie impulsów dla obu kierunków wirowania. Liczby impulsów w obu seriach powinny być jednakowe. Po rozruchu i odwzorowaniu pierwszej serii impulsów, wirnik silnika zmienia kierunek ruchu i odwzorowuje drugą serię impulsów, wracając do położenia wyjściowego.
Wyznacza się rodzinę charakterystyk, przy czym każdy rozruch należy zaczynać przy innej kombinacji załączonych pasm uzwojeń, wynikającej ze znamionowego cyklu komutacji. Dla każdego stanu wyznacza się dwie charakterystyki: jedną przy rozruchu w prawo, drugą przy rozruchu w lewo. Za wartość maksymalnej częstotliwości nawrotu przyjmuje się najmniejszą spośród wartości otrzymanych ze wszystkich charakterystyk.
6.3.4. Wyznaczanie odpowiedzi silnika na skok jednostkowy
Wyznaczenie odpowiedzi silnika skokowego na skok jednostkowy ma duże znaczenie praktyczne, gdyż na podstawie otrzymanego przebiegu można wyznaczyć amplitudy przeregulowań wirnika, logarytmiczny dekrement tłumienia oraz częstotliwość kątową drgań własnych (tłumionych i nictlumionych).
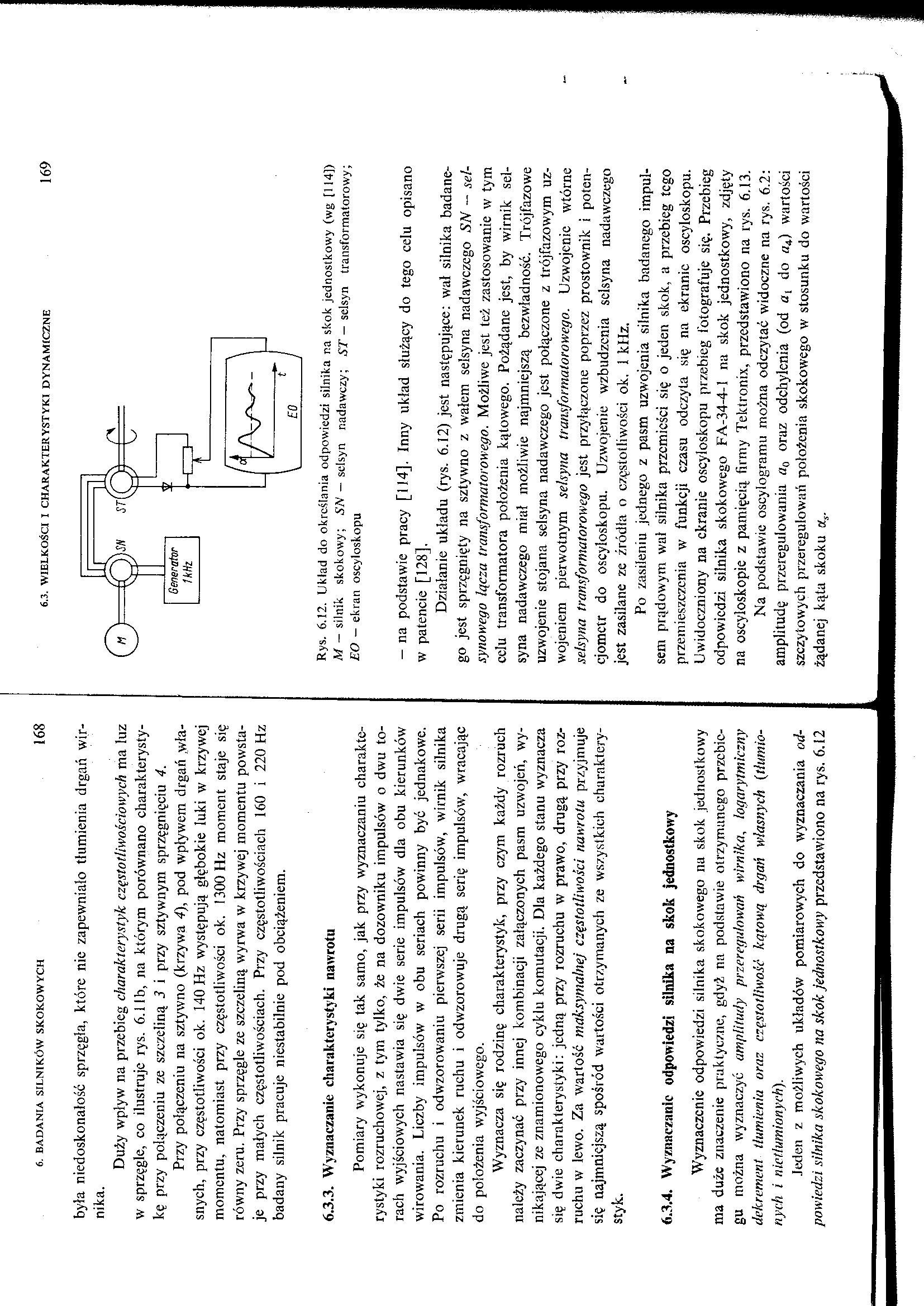
Jeden z możliwych układów pomiarowych do wyznaczania odpowiedzi silnika skokowego na skok jednostkowy przedstawiono na rys. 6.12
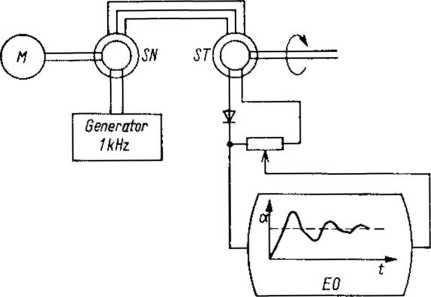
Rys. 6.12. Układ do określania odpowiedzi silnika na skok jednostkowy (wg [114]) M — silnik skokowy; SN — sclsyn nadawczy; ST — selsyn transformatorowy; EO — ekran oscyloskopu
— na podstawie pracy [114], Inny układ służący do tego celu opisano w patencie [128],
Działanie układu (rys. 6.12) jest następujące: wal silnika badanego jest sprzęgnięty na sztywno z wałem selsyna nadawczego SN — sel-synowego łącza transformatorowego. Możliwe jest też zastosowanie w tym celu transformatora położenia kątowego. Pożądane jest, by wirnik selsyna nadawczego miał możliwie najmniejszą bezwładność. Trójfazowe uzwojenie stojana selsyna nadawczego jest połączone z trójfazowym uzwojeniem pierwotnym selsyna transformatorowego. Uzwojenie wtórne selsyna transformatorowego jest przyłączone poprzez prostownik i potencjometr do oscyloskopu. Uzwojenie wzbudzenia selsyna nadawczego jest zasilane ze źródła o częstotliwości ok. 1 kllz.
Po zasileniu jednego z pasm uzwojenia silnika badanego impulsem prądowym wał silnika przemieści się o jeden skok, a przebieg tego przemieszczenia w funkcji czasu odczyta się na ekranie oscyloskopu. Uwidoczniony na ekranie oscyloskopu przebieg fotografuje się. Przebieg odpowiedzi silnika skokowego FA-34-4-1 na skok jednostkowy, zdjęty na oscyloskopie z pamięcią firmy Tektronix, przedstawiono na rys. 6.13.
Na podstawie oscylogramu można odczytać widoczne na rys. 6.2: amplitudę przeregulowania a0 oraz odchylenia (od al do aA) wartości szczytowych przeregulowań położenia skokowego w stosunku do wartości żądanej kąta skoku ots.
Wyszukiwarka
Podobne podstrony:
instalacje139 6. BADANIA SILNIKÓW SKOKOWYCH 158 — znamionowy kąt skoku as silnika
instalacje142 6. BADANIA SILNIKÓW SKOKOWYCH 164 żenie wirnika. Można zaobserwować, że charakterystyk
instalacje143 6. BADANIA SILNIKÓW SKOKOWYCH 166 Rys. 6.10. Układ do zdejmowania charakterystyki gran
instalacje145 6. BADANIA SILNIKÓW SKOKOWYCH 170 Rys. 6.13. Odpowiedź silnika FA-34-4-1 na skok jedno
instalacje148 6. BADANIA SILNIKÓW SKOKOWYCH 176 Pomiar kąta można zastąpić pomiarem czasu obrotu. Wt
instalacje149 6. BADANIA SILNIKÓW SKOKOWYCH 178 Układ sterujący zadawaniem momentu oporowego
instalacje141 6. BADANIA SILNIKÓW SKOKOWYCH 162 momentów (0-=-7,5 oraz 0-=-15 N* cm). Dokładność pom
instalacje146 6. BADANIA SILNIKÓW SKOKOWYCH 172 Zatem, moment bezwładności wirnika silnika skokowego
60323 instalacje140 6. BADANIA SILNIKÓW SKOKOWYCH 160 Pomiaru momentu dokonuje się za pomocą ciężark
instalacje147 6. BADANIA SILNIKÓW SKOKOWYCH 174 Uzyskuje się zależność wiążącą moment silnika skokow
więcej podobnych podstron