instalacje143
6. BADANIA SILNIKÓW SKOKOWYCH 166
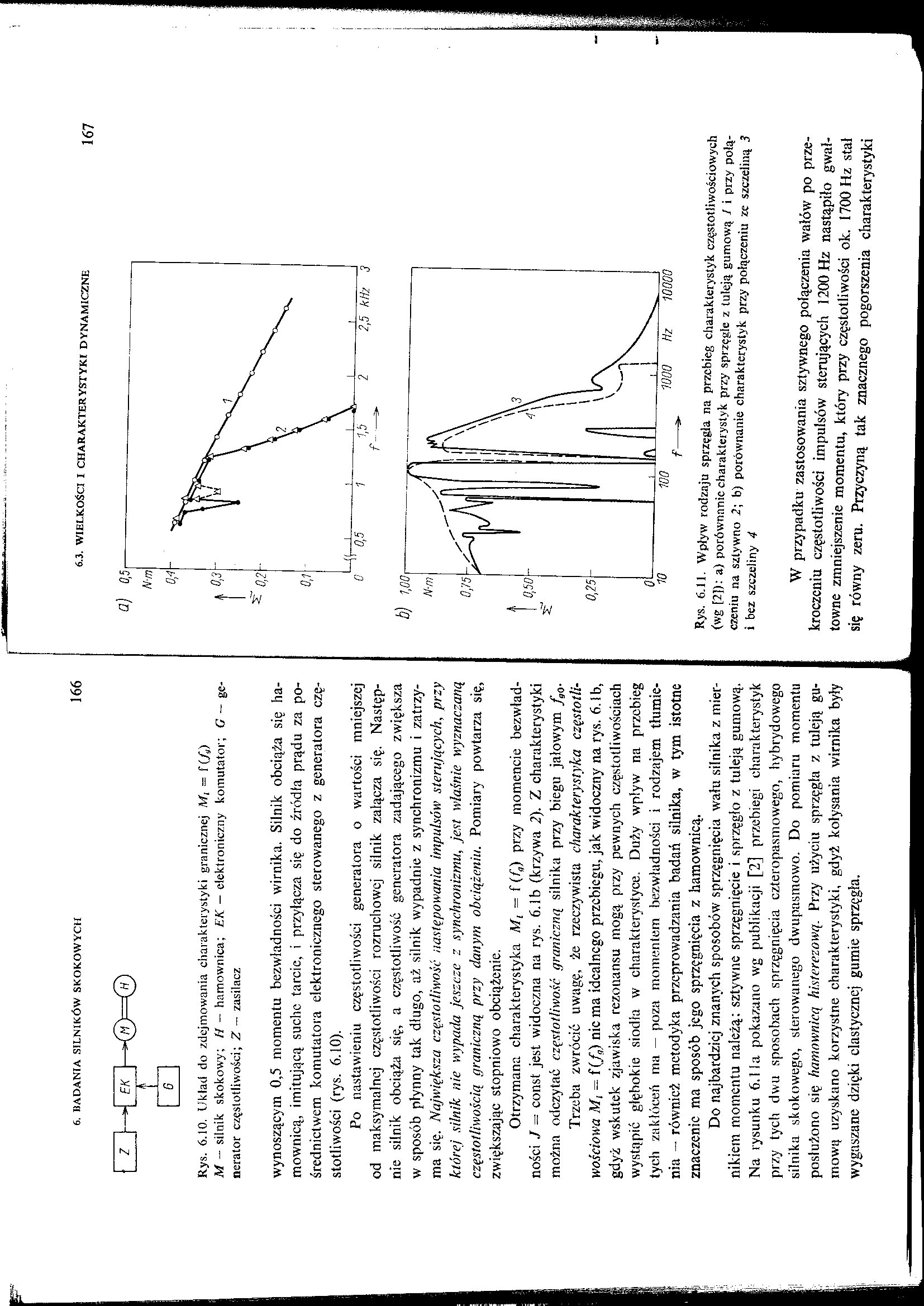
Rys. 6.10. Układ do zdejmowania charakterystyki granicznej Mt ~ f (fg)
M — silnik skokowy; H — hamownica; EK — elektroniczny komutator; G — generator częstotliwości; Z — zasilacz wynoszącym 0,5 momentu bezwładności wirnika. Silnik obciąża się ha-mownicą, imitującą suche tarcie, i przyłącza się do źródła prądu za pośrednictwem komutatora elektronicznego sterowanego z generatora częstotliwości (rys. 6.10).
Po nastawieniu częstotliwości generatora o wartości mniejszej od maksymalnej częstotliwości rozruchowej silnik załącza się. Następnie silnik obciąża się, a częstotliwość generatora zadającego zwiększa w sposób płynny tak długo, aż silnik wypadnie z synchronizmu i zatrzyma się. Największa częstotliwość następowania impulsów sterujących, przy której silnik nie wypada jeszcze z synchronizmu, jest właśnie wyznaczaną częstotliwością graniczną przy danym obciążeniu. Pomiary powtarza się, zwiększając stopniowo obciążenie.
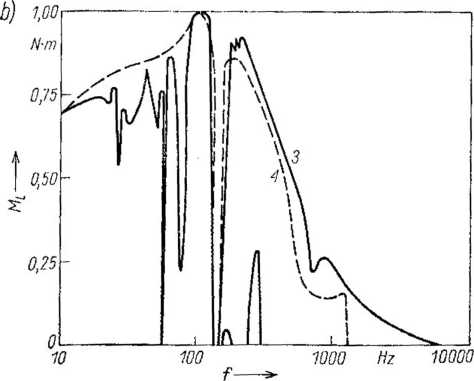
Otrzymana charakterystyka Mt — f (fq) przy momencie bezwładności J ~ const jest widoczna na rys. 6.1 b (krzywa 2). Z charakterystyki można odczytać częstotliwość graniczną silnika przy biegu jałowym fg0.
Trzeba zwrócić uwagę, że rzeczywista charakterystyka częstotliwościowa Mt = f (ffj) nic ma idealnego przebiegu, jak widoczny na rys. 6.1 b, gdyż wskutek zjawiska rezonansu mogą przy pewnych częstotliwościach wystąpić głębokie siodła w charakterystyce. Dnży wpływ na przebieg tych zakłóceń ma — poza momentem bezwładności i rodzajem tłumienia - również metodyka przeprowadzania badań silnika, w tym istotne znaczenie ma sposób jego sprzęgnięcia z hamownicą.
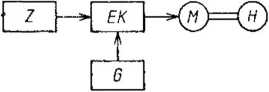
Do najbardziej znanych sposobów sprzęgnięcia wału silnika z miernikiem momentu należą: sztywne sprzęgnięcie i sprzęgło z tuleją gumową. Na rysunku 6.1 la pokazano wg publikacji [2] przebiegi charakterystyk przy tych dwu sposobach sprzęgnięcia cztero pasm owego, hybrydowego silnika skokowego, sterowanego dwupasmowo. Do pomiaru momentu posłużono się hamownicą histerezową. Przy użyciu sprzęgła z tuleją gumową uzyskano korzystne charakterystyki, gdyż kołysania wirnika były wygaszane dzięki elastycznej gumie sprzęgła.
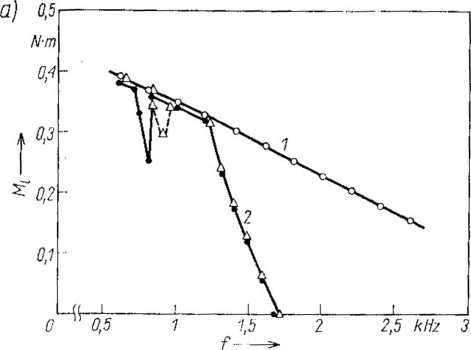
Rys. 6.11. Wpływ rodzaju sprzęgła na przebieg charakterystyk częstotliwościowych (wg [2]): a) porównanie charakterystyk przy sprzęgle z tuleją gumową I i przy połączeniu na sztywno 2\ b) porównanie charakterystyk przy połączeniu ze szczeliną 3 i bez szczeliny 4
W przypadku zastosowania sztywnego połączenia wałów po przekroczeniu częstotliwości impulsów sterujących 1200 Hz nastąpiło gwałtowne zmniejszenie momentu, który przy częstotliwości ok. 1700 Hz stal się równy zeru. Przyczyną tak znacznego pogorszenia charakterystyki
Wyszukiwarka
Podobne podstrony:
instalacje145 6. BADANIA SILNIKÓW SKOKOWYCH 170 Rys. 6.13. Odpowiedź silnika FA-34-4-1 na skok jedno
33275 instalacje123 4. TEORIA SILNIKA SKOKOWEGO 128 Rys. 4.2J. Układ sterowania silnika skokowego z
instalacje142 6. BADANIA SILNIKÓW SKOKOWYCH 164 żenie wirnika. Można zaobserwować, że charakterystyk
instalacje149 6. BADANIA SILNIKÓW SKOKOWYCH 178 Układ sterujący zadawaniem momentu oporowego
instalacje161 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 202 Rys. 7.19. Schemat automatu do badania elementó
instalacje103 3. STEROWANIE SILNIKÓW SKOKOWYCH 88 Rys. 3.17. Mikroprocesorowy układ sterowania silni
66208 instalacje154 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 188 Rys. 7.8. Układ sterowania silnika skokow
więcej podobnych podstron