instalacje103
3. STEROWANIE SILNIKÓW SKOKOWYCH 88
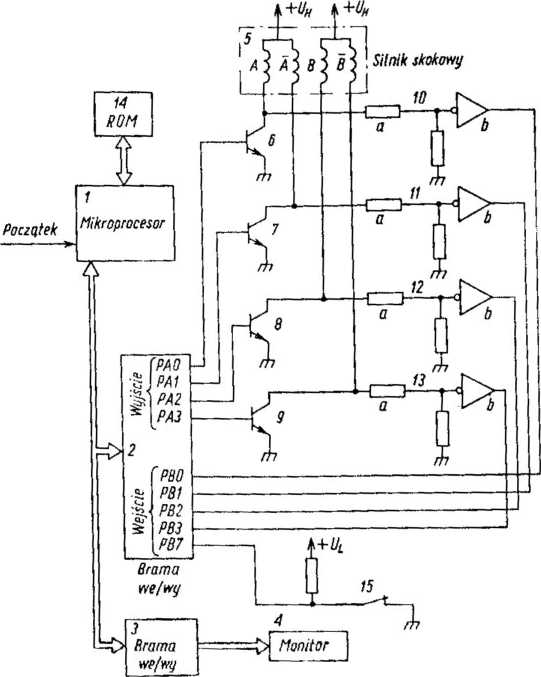
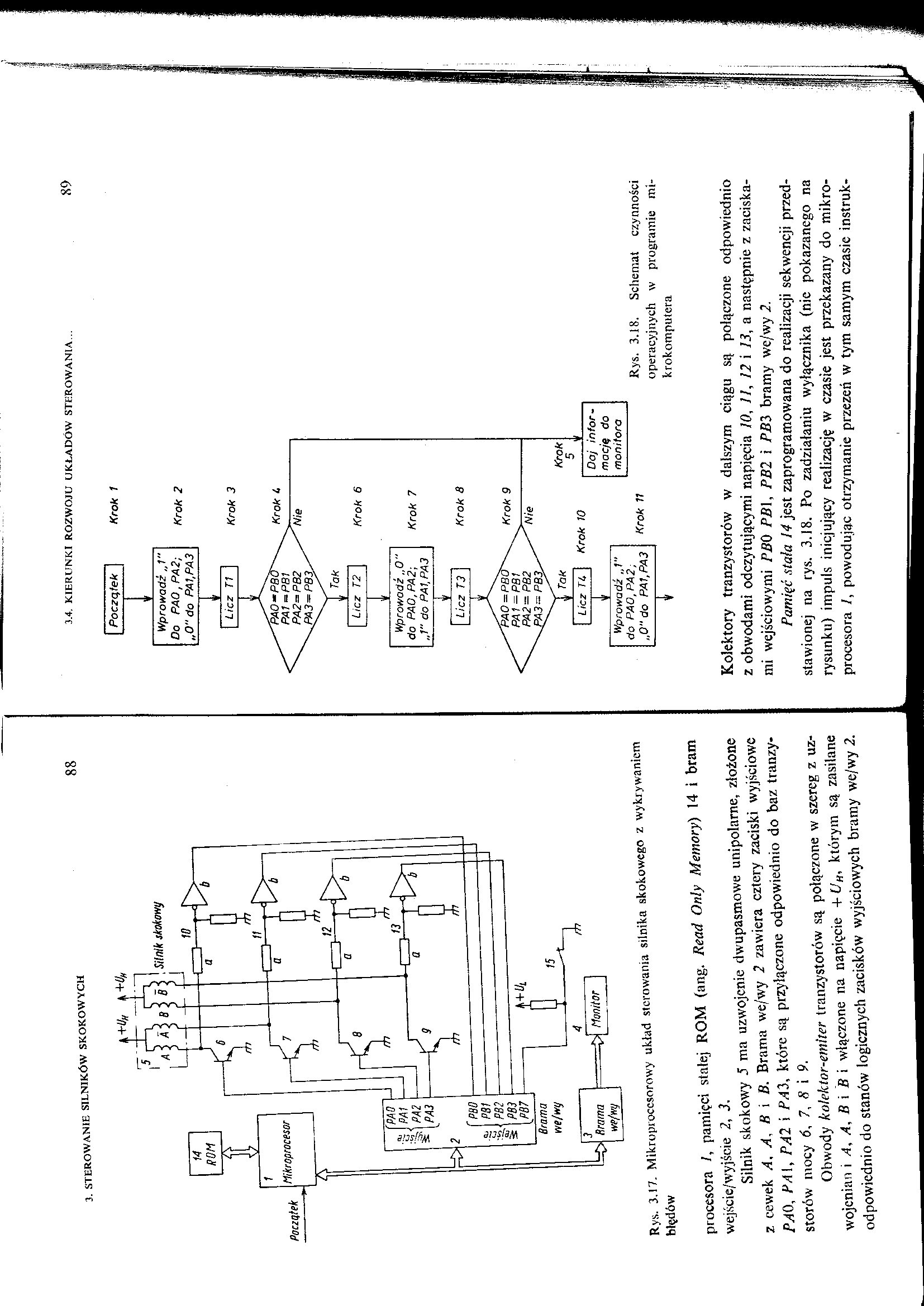
Rys. 3.17. Mikroprocesorowy układ sterowania silnika skokowego z wykrywaniem błędów
procesora /, pamięci stałej ROM (ang. Read Only Memory) 14 i bram wejście/wyjście 2, 3.
Silnik skokowy 5 ma uzwojenie dwupasmowe unipolarne, złożone z cewek A, A, B i B. Brama we/wy 2 zawiera cztery zaciski wyjściowe PAO, PA 1, 7M2 i PA2> które są przyłączone odpowiednio do baz tranzystorów mocy d, 7, # i 9.
Obwody kolektor-emiter tranzystorów są połączone w szereg z uz-wojenian i A, A, B i B i włączone na napięcie +UH, którym są zasilane odpowiednio do stanów logicznych zacisków wyjściowych bramy we/wy 2.
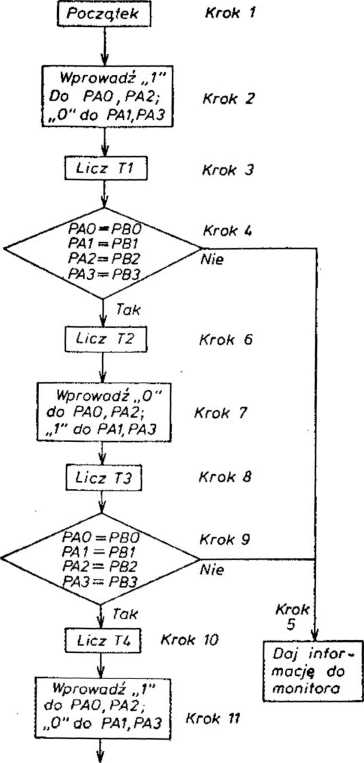
Rys. 3.18. Schemat czynności operacyjnych w programie mikrokomputera
Kolektory tranzystorów w dalszym ciągu są połączone odpowiednio z obwodami odczytującymi napięcia 10, 11, 12 i 13, a następnie z zaciskami wejściowymi PBO PB\, PB2 i PBZ bramy we/wy 2.
Pamięć stała 14 jest zaprogramowana do realizacji sekwencji przedstawionej na rys. 3.18. Po zadziałaniu wyłącznika (nic pokazanego na rysunku) impuls inicjujący realizację w czasie jest przekazany do mikroprocesora 1, powodując otrzymanie przezeń w tym samym czasie instruk-
Wyszukiwarka
Podobne podstrony:
instalacje094 X STEROWANIE SILNIKÓW SKOKOWYCH 70 Rys. 3.2. Komutacja symetryczna silnika skokowego:
instalacje098 3. STEROWANIE SILNIKÓW SKOKOWYCH 78 wartość maksymalną, to wyłącznik W (rys. 3.9b) zos
66208 instalacje154 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 188 Rys. 7.8. Układ sterowania silnika skokow
33275 instalacje123 4. TEORIA SILNIKA SKOKOWEGO 128 Rys. 4.2J. Układ sterowania silnika skokowego z
instalacje102 3. STEROWANIE SILNIKÓW SKOKOWYCH 85 mable Read Only Memory). Na wyjściu układu PROM je
instalacje143 6. BADANIA SILNIKÓW SKOKOWYCH 166 Rys. 6.10. Układ do zdejmowania charakterystyki gran
instalacje145 6. BADANIA SILNIKÓW SKOKOWYCH 170 Rys. 6.13. Odpowiedź silnika FA-34-4-1 na skok jedno
instalacje152 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 184 dów sterowania z silnikami skokowymi o znacznie
instalacje159 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 198 Rys. 7.16. Schemat pracy skanera termalnego z e
instalacje161 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 202 Rys. 7.19. Schemat automatu do badania elementó
więcej podobnych podstron