instalacje159
7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 198

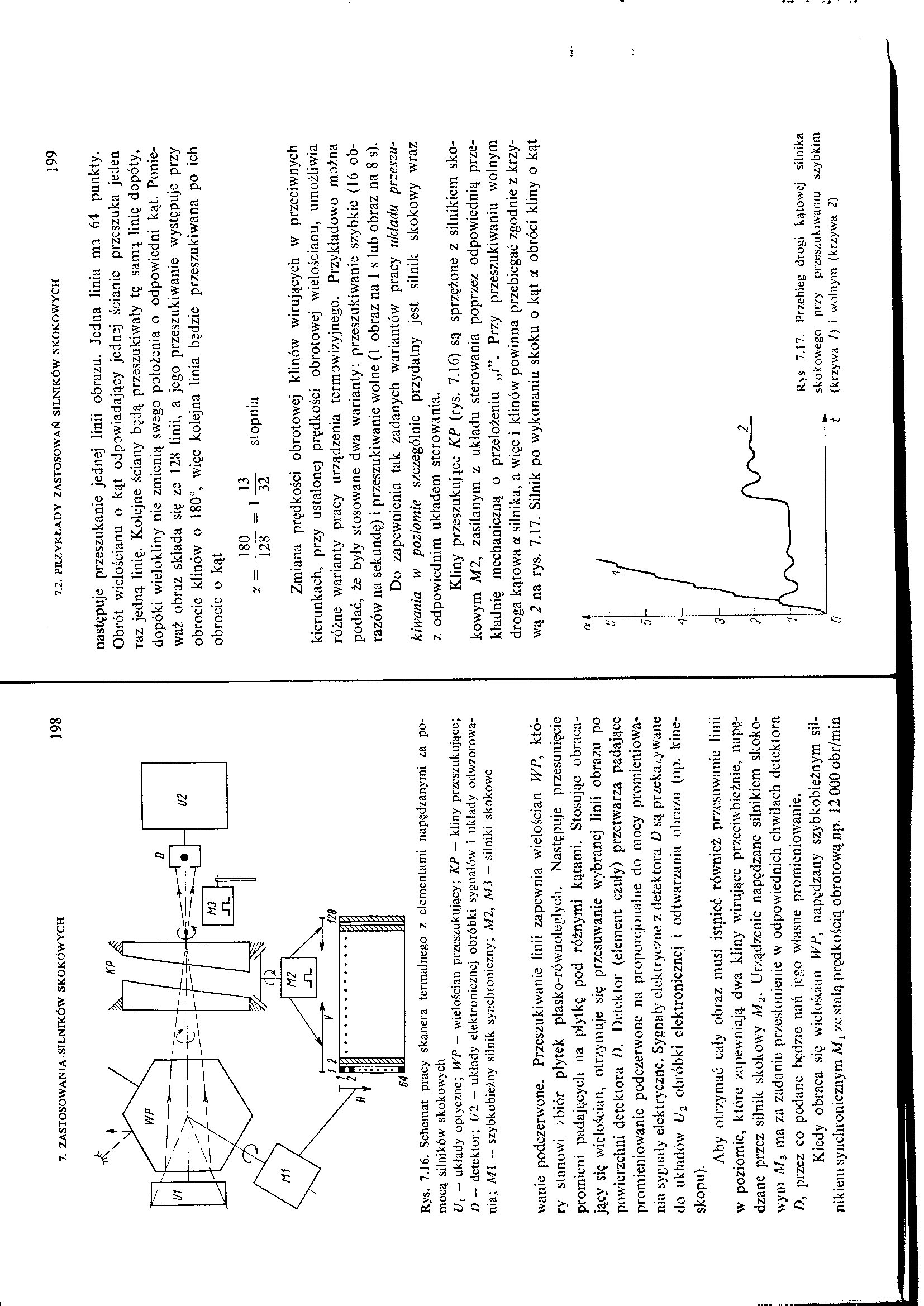
Rys. 7.16. Schemat pracy skanera termalnego z elementami napędzanymi za pomocą silników skokowych
Ui — układy optyczne; WP — wielościan przeszukujący; KP — kliny przeszukujące; D — detektor; U2 — układy elektronicznej obróbki sygnałów i układy odwzorowania; Ml — szybkobieżny silnik synchroniczny; M2, M3 — silniki skokowe
wanie podczerwone. Przeszukiwanie linii zapewnia wielościan WP, który stanowi z biór płytek plasko-równoległych. Następuje przesunięcie promieni padających na płytkę pod różnymi kątami. Stosując obracający się wielościan, otrzymuje się przesuwanie wybranej linii obrazu po powierzchni detektora D. Detektor (element czuły) przetwarza padające promieniowanie podczerwone na proporcjonalne do mocy promieniowania sygnały elektryczne. Sygnały elektryczne z detektora D są przekazywane do układów U2 obróbki elektronicznej i odtwarzania obrazu (np. kineskopu).
Aby otrzymać cały obraz musi istnieć również przesuwanie linii w poziomic, które zapewniają dwa kliny wirujące przeciwbieżnie, napędzane przez silnik skokowy M2> Urządzenie napędzane silnikiem skokowym ma za zadanie przeslonienie w odpowiednich chwilach detektora D, przez co podane będzie nań jego własne promieniowanie.
Kiedy obraca się wielościan WP, napędzany szybkobieżnym silnikiem synchronicznym A/, ze stalą prędkością obrotową np. 12 000 obr/min następuje przeszukanie jednej linii obrazu. Jedna linia ma 64 punkty. Obrót wielościanu o kąt odpowiadający jednej ścianie przeszuka jeden raz jedną linię. Kolejne ściany będą przeszukiwały tę samą linię dopóty, dopóki wielokliny nie zmienią swego położenia o odpowiedni kąt. Ponieważ obraz składa się ze 128 linii, a jego przeszukiwanie występuje przy obrocie klinów o 180°, więc kolejna linia będzie przeszukiwana po ich obrocie o kąt
stopnia
180^_13 128 ~ 32
Zmiana prędkości obrotowej klinów wirujących w przeciwnych kierunkach, przy ustalonej prędkości obrotowej wielościanu, umożliwia różne warianty pracy urządzenia termowizyjnego. Przykładowo można podać, że były stosowane dwa warianty: przeszukiwanie szybkie (16 obrazów na sekundę) i przeszukiwanie wolne (1 obraz na 1 s lub obraz na 8 s).
Do zapewnienia tak zadanych wariantów pracy układu przeszukiwania w poziomie szczególnie przydatny jest silnik skokowy wraz z odpowiednim układem sterowania.
Kliny przeszukujące KP (rys. 7.16) są sprzężone z silnikiem skokowym M2, zasilanym z układu sterowania poprzez odpowiednią przekładnię mechaniczną o przełożeniu Przy przeszukiwaniu wolnym droga kątowa a silnika, a więc i klinów powinna przebiegać zgodnie z krzywą 2 na rys. 7.17. Silnik po wykonaniu skoku o kąt ot obróci kliny o kąt
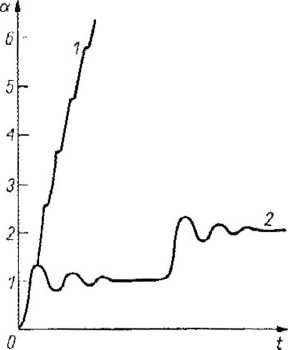
Rys. 7.17. Przebieg drogi kątowej silnika skokowego przy przeszukiwaniu szybkim (krzywa /) i wolnym (krzywa 2)
Wyszukiwarka
Podobne podstrony:
instalacje161 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 202 Rys. 7.19. Schemat automatu do badania elementó
66208 instalacje154 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 188 Rys. 7.8. Układ sterowania silnika skokow
instalacje162 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 204 myślę chemicznym [152]. Uproszczony schemat nap
instalacje158 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 196 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 196 Rys. 7.1
instalacje155 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 190 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 190 1 Rys. 7
instalacje094 X STEROWANIE SILNIKÓW SKOKOWYCH 70 Rys. 3.2. Komutacja symetryczna silnika skokowego:
instalacje143 6. BADANIA SILNIKÓW SKOKOWYCH 166 Rys. 6.10. Układ do zdejmowania charakterystyki gran
instalacje145 6. BADANIA SILNIKÓW SKOKOWYCH 170 Rys. 6.13. Odpowiedź silnika FA-34-4-1 na skok jedno
więcej podobnych podstron