instalacje161

7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 202
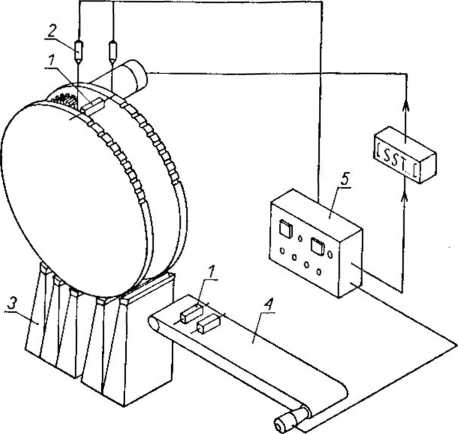
Rys. 7.19. Schemat automatu do badania elementów mikroelektronicznych z zastosowaniem silnika skokowego (wg [151])
1 - element badany; 2 — końcówki pomiarowe; 3 — sortownik; 4 — transporter podający; 5— sterowanie mikroprocesorowe
racji wynosi maksymalnie 200 ms. Bęben jest napędzany przez silnik skokowy poprzez przekładnię o przełożeniu od 1-hIO do 1:100. Przedział pomiędzy sprawdzanymi detalami wynosi 45 mm. Zastosowany pięciopa-smowy silnik skokowy spełnia wymigania dobrych właściwości dynamicznych i dużej dokładności pozycjonowania.
Przebieg zmian częstotliwości silnika skokowego wymagany przy pozycjonowaniu bębna automatu pomiarowego przedstawiono na rys. 7.20.
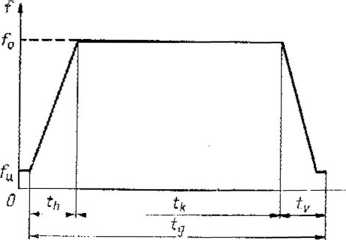
Rys. 7.20. Przebieg częstotliwości silniku skokowego przy pozycjonowaniu bębna automatu pomiarowego (wg {i51J)
Czas pozycjonowania
tg — th + tk + tv (7-2)
gdzie:
4 — czas rozbiegu;
4 — czas pracy;
4 — czas zatrzymywania.
Przy liniowych przebiegach rozbiegu i zatrzymywania czasy 4 i 4 są sobie równe.
Czas rozbiegu (s) można wyliczyć ze wzoru
(7.3)
2Jnof 360' M
gdzie:
J — wypadkowy moment bezwładności silnika i obciążenia, kg-m2; « — kąt skoku w stopniach;
/ — częstotliwość silnika skokowego, Hz;
M — moment obrotowy, N-m.
7.2.6. Inne zastosowania silników skokowych
Szczegółowe opisanie licznych zastosowań silników skokowych musiałoby wykroczyć znacznie poza zaplanowane ramy tej książki, będą więc one skrótowo potraktowane w tym punkcie.
Jednym z tych zastosowań jest napęd urządzeń występujących w medycynie, których przykładem może być napęd elektryczny pompy dozującej o dużej dokładności, stosowanej poza medycyną również w prze-
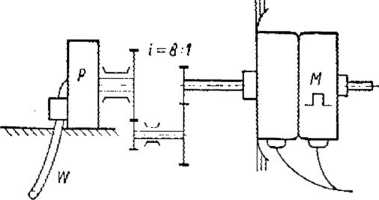
Rys. 7.21. Napęd skokowy pompy dozującej stosowanej w medycynie (wg 1152]) M — silnik skokowy; P — pompa dozująca; W — wąż
Wyszukiwarka
Podobne podstrony:
instalacje159 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 198 Rys. 7.16. Schemat pracy skanera termalnego z e
66208 instalacje154 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 188 Rys. 7.8. Układ sterowania silnika skokow
instalacje162 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 204 myślę chemicznym [152]. Uproszczony schemat nap
instalacje158 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 196 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 196 Rys. 7.1
instalacje155 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 190 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 190 1 Rys. 7
instalacje094 X STEROWANIE SILNIKÓW SKOKOWYCH 70 Rys. 3.2. Komutacja symetryczna silnika skokowego:
instalacje150 7. Zastosowania silników skokowych7.1. Porównanie napędów z silnikam
instalacje152 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 184 dów sterowania z silnikami skokowymi o znacznie
więcej podobnych podstron