instalacje150

7. Zastosowania silników skokowych
7.1. Porównanie napędów z silnikami skokowymi z innymi rodzajami napędów elektrycznych
7.1.1. Silnik skokowy w układzie otwartym
W niektórych publikacjach [132; 146] za główne zalety zastosowania silnika skokowego w napędzie, w porównaniu z serwonapędem prądu stałego, uważa się:
— niewystępowanie sprzężenia zwrotnego;
— możliwość realizowania bardzo małych przemieszczeń (1 skok na dobę) bez stosowania przekładni mechanicznej;
— możliwość prostej synchronizacji wirowania kilku silników skokowych;
— dużą niezawodność;
— niską cenę.
Podkreśla się luki, że silnik skokowy w układzie otwartym zastępuje system złożony z silnika wykonawczego, wzmacniacza, prądnicy tachometrycznej i przekładni. Ma on ponadto mniejszy prąd rozruchowy i charakteryzuje się łatwością zastosowania w układach cyfrowych, bardzo obecnie rozpowszechnionych.
Jako wady silnika skokowego wymienia się:
— możliwość wypadania z synchronizmu;
— mniejszą prędkość maksymalną;
— możliwość występowania stref rezonansowych częstotliwości sterowania;
— oscylacje powstające w końcu skoku [146].
Zwraca się również uwagę na mniejszą sprawność, większe wymiary i wyższy poziom hałasu oraz gorsze wskaźniki dynamiczne w porównaniu z silnikami prądu stałego i silnikami indukcyjnymi prądu przemiennego [134].
Niektóre typy silników skokowych są wrażliwe na zmiany temperatury. Przy zmianie temperatury od — 55°C do +125°C moment ob-
O) Wzmacniacz
/ mocy
•>)
Falownik Wzmm°0ccnjacz
M \ a
Obiekt
regulacji
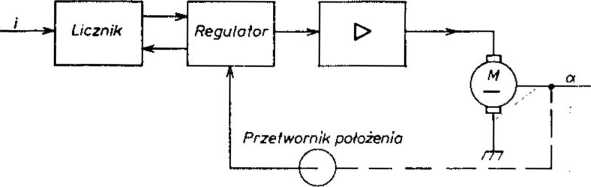
Przetwornik położenia
O--
Wzmacniacz
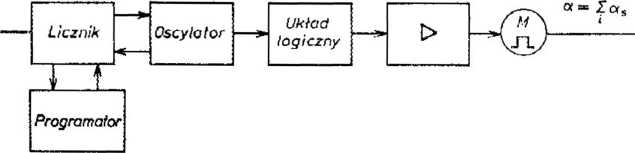
Rys. 7.1. Uproszczone schematy blokowe układów regulacji położeniowej z silnikiem: a) prądu stałego; b) indukcyjnym; c) skokowym
Wyszukiwarka
Podobne podstrony:
instalacje152 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 184 dów sterowania z silnikami skokowymi o znacznie
instalacje153 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 186 Sprzężenie zwrotne prędkościowe, dzięki sygnało
instalacje156 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 192 7.2.2. Napędy urządzeń do pisania Do grupy urzą
instalacje157 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 194 — do obrotu wałka (silnik Y);
instalacje159 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 198 Rys. 7.16. Schemat pracy skanera termalnego z e
instalacje160 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 200 a = 1 13 "32 stopnia i będzie przeszukiwa
instalacje161 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 202 Rys. 7.19. Schemat automatu do badania elementó
instalacje162 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 204 myślę chemicznym [152]. Uproszczony schemat nap
instalacje163 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 206 naprowadzanie ich na pożądany cel. Na przykład
instalacje151 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 182 rotowy może zmaleć czterokrotnie [138]. Silnik
instalacje158 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 196 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 196 Rys. 7.1
66208 instalacje154 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 188 Rys. 7.8. Układ sterowania silnika skokow
więcej podobnych podstron