instalacje160
7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 200
a' = 1
13
"32
stopnia i będzie przeszukiwana kolejna linia. Liczba poszuki
wań tej samej linii jest zależna od okresu T doprowadzanych do silnika skokowego impulsów sterujących.
Przy przeszukiwaniu szybkim silnik skokowy musi pracować z dużą częstotliwością (ponad 2000 Hz). Droga kątowa silnika w funkcji czasu powinna mieć przebieg 1 pokazany na rys. 7.17. W czasie jednego okresu (jednego skoku silnika) wielościan przeszukujący linię powinien obrócić się o kąt odpowiadający jego jednej ścianie.
W celu zapewnienia pracy silnika skokowego, umożliwiającej zrealizowanie obu rozpatrzonych wariantów działania urządzenia termalnego musi być odpowiednio zaprogramowany elektroniczny układ sterowania.
W opisanym tutaj układzie napędowym elementów skanera termalnego był zastosowany silnik skokowy FB-20-24c, produkcji Warszawskich Zakładów Maszyn Elektrycznych WAMEL.
7.2.5. Silniki skokowe w technice pomiarowej
Możliwości zastosowania silników skokowych w technice pomiarowej są bardzo szeroko wykorzystywane. Poniżej przedstawiono kilka bardziej interesujących przykładów.
Pięciopasmowe silniki skokowe zastosowano w pomiarowym pro-filowym projektorze z mikroprocesorowym sterowaniem serii ST, produkowanym przez firmę „Heinrich-Schneider” GmbH (REN) [142]. Projektor pomiarowy jest wyposażony w fotometryczny przetwornik o dokładności pozycjonowania + l,5j.im i takiej samej dokładności odtwarzania położenia.
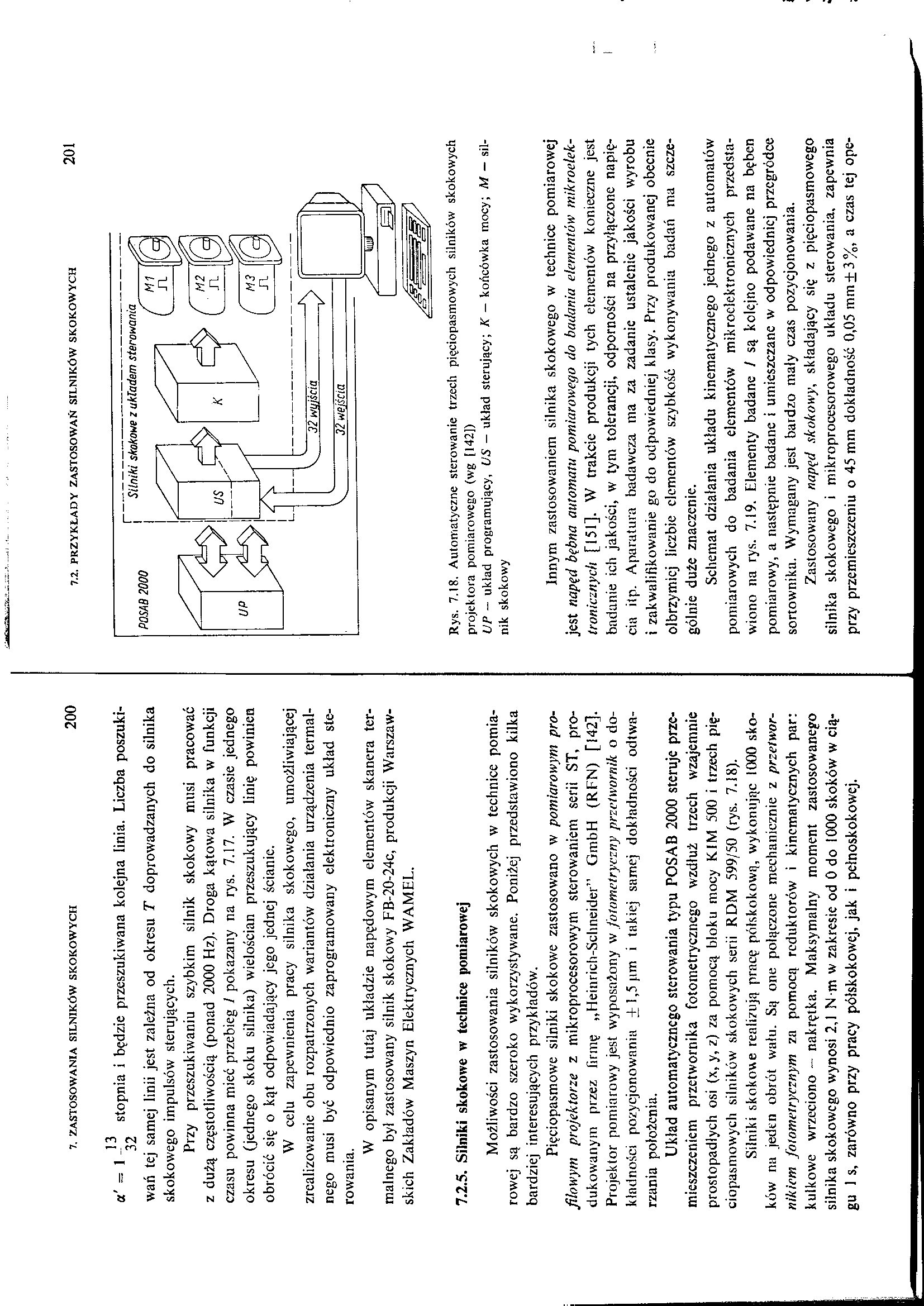
Układ automatycznego sterowania typu POSAB 2000 steruje przemieszczeniem przetwornika fotometrycznego wzdłuż trzech wzajemnie prostopadłych osi (x, y, z) za pomocą bloku mocy KIM 500 i trzech pię-ciopasmowych silników skokowych serii RDM 599/50 (rys. 7.18).
Silniki skokowe realizują pracę półskokową, wykonując 1000 skoków na jeden obrót wału. Są one połączone mechanicznie z przetwornikiem joiomeirycznym za pomocą reduktorów i kinematycznych par: kulkowe wrzeciono — nakrętka. Maksymalny moment zastosowanego silnika skokowego wynosi 2,1 N m w zakresie od 0 do 1000 skoków w ciągu 1 s, zarówno przy pracy półskokowej, jak i petnoskokowej.
■
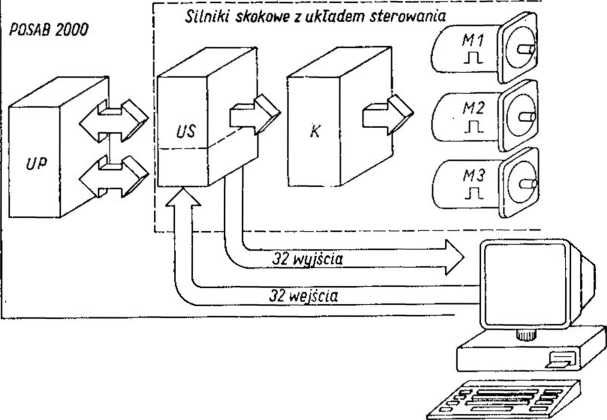
Rys. 7.18. Automatyczne sterowanie trzech pięciopasmowych silników skokowych projektora pomiarowego (wg [142])
UP — układ programujący, US — układ sterujący; K — końcówka mocy; M — silnik skokowy
Innym zastosowaniem silnika skokowego w technice pomiarowej jest napęd bębna automatu pomiarowego do badania elementów mikroelek-tronicznych [151]. W trakcie produkcji tych elementów konieczne jest badanie ich jakości, w tym tolerancji, odporności na przyłączone napięcia itp. Aparatura badawcza ma za zadanie ustalenie jakości wyrobu i zakwalifikowanie go do odpowiedniej klasy. Przy produkowanej obecnie olbrzymiej liczbie elementów szybkość wykonywania badań ma szczególnie duże znaczenie.
Schemat działania układu kinematycznego jednego z automatów pomiarowych do badania elementów mikroelektronicznych przedstawiono na rys. 7.19. Elementy badane / są kolejno podawane na bęben pomiarowy, a następnie badane i umieszczane w odpowiedniej przegródce sortownika. Wymagany jest bardzo mały czas pozycjonowania.
Zastosowany napęd skokowy, składający się z pięciopasmowego silnika skokowego i mikroprocesorowego układu sterowania, zapewnia przy przemieszczeniu o 45 mm dokładność 0,05 mm + 3% a czas tej ope-
Wyszukiwarka
Podobne podstrony:
instalacje150 7. Zastosowania silników skokowych7.1. Porównanie napędów z silnikam
instalacje152 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 184 dów sterowania z silnikami skokowymi o znacznie
instalacje153 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 186 Sprzężenie zwrotne prędkościowe, dzięki sygnało
instalacje156 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 192 7.2.2. Napędy urządzeń do pisania Do grupy urzą
instalacje157 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 194 — do obrotu wałka (silnik Y);
instalacje159 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 198 Rys. 7.16. Schemat pracy skanera termalnego z e
instalacje161 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 202 Rys. 7.19. Schemat automatu do badania elementó
instalacje162 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 204 myślę chemicznym [152]. Uproszczony schemat nap
instalacje163 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 206 naprowadzanie ich na pożądany cel. Na przykład
instalacje151 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 182 rotowy może zmaleć czterokrotnie [138]. Silnik
instalacje158 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 196 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 196 Rys. 7.1
66208 instalacje154 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 188 Rys. 7.8. Układ sterowania silnika skokow
więcej podobnych podstron