instalacje152
7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 184
dów sterowania z silnikami skokowymi o znacznie lepszych właściwościach dynamicznych niż w przypadku układu otwartego [130; 133; 137; 141].
Właściwości dynamiczne silnika skokowego w układzie otwartym są gorsze niż w przypadku napędów z silnikami prądu stałego i indukcyjnymi. Dlatego trzeba brać pod uwagę jego pracę w układzie zamkniętym, w którym jego właściwości dynamiczne są porównywalne z właściwościami serwonapędów prądu stałego i asynchronicznych prądu przemiennego.
W publikacji [144] wykazano, że zastosowanie w napędach urządzeń do obróbki metali silnika skokowego w układzie zamkniętym ma wiele zalet w stosunku do napędu prądu stałego i umożliwia zwiększenie momentu znamionowego napędu.
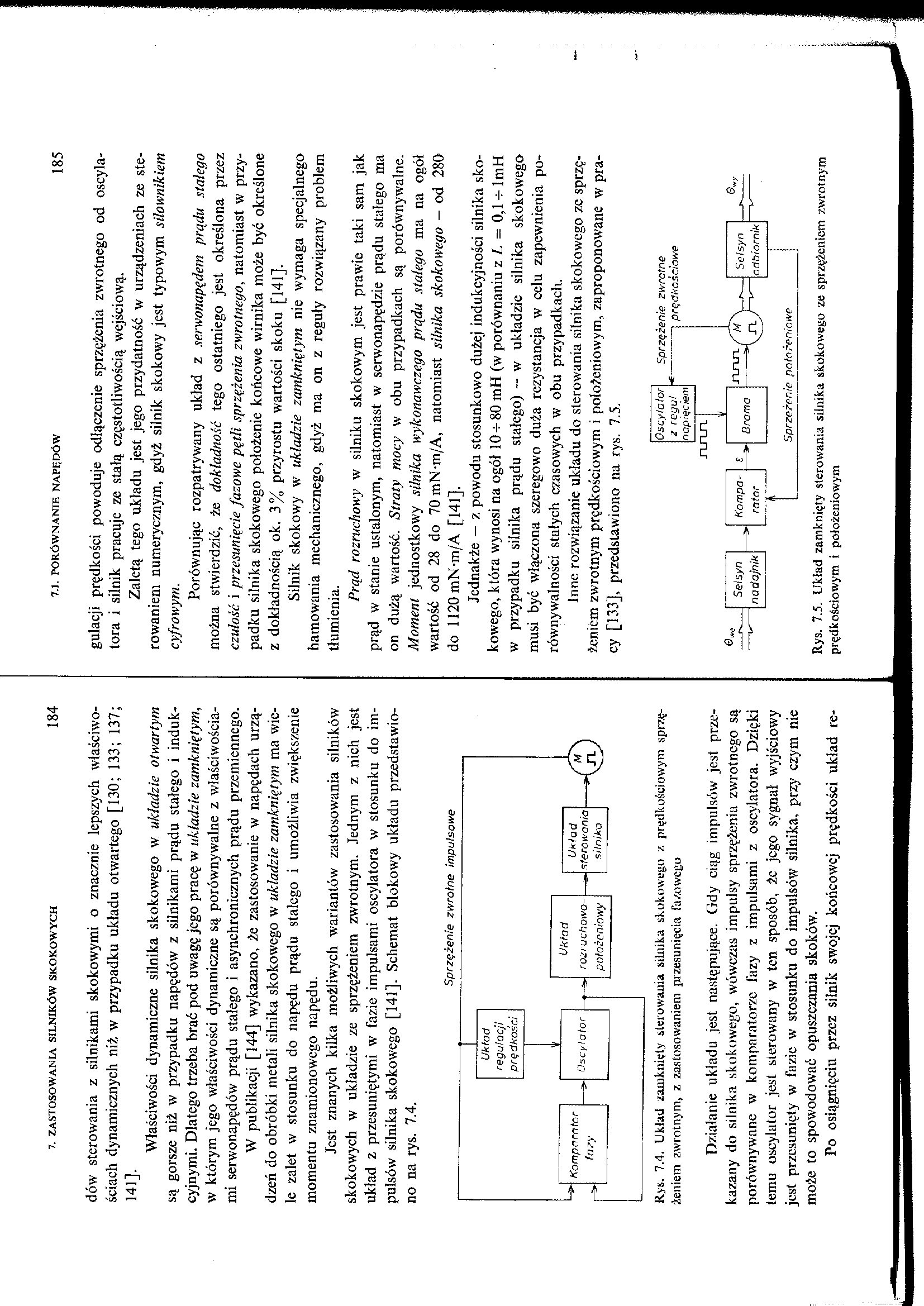
Jest znanych kilka możliwych wariantów zastosowania silników skokowych w układzie ze sprzężeniem zwrotnym. Jednym z nich jest układ z przesuniętymi w fazie impulsami oscylatora w stosunku do impulsów silnika skokowego [141]. Schemat blokowy układu przedstawiono na rys. 7.4,
Sprzężenie zwrotne impulsowe

Rys, 7.4. UklaU zamknięty sterowania silnika skokowego z prędkośetowym sprzężeniem zwrotnym, z zastosowaniem przesunięcia fazowego
Działanie układu jest następujące. Gdy ciąg impulsów jest przekazany do silnika skokowego, wówczas impulsy sprzężenia zwrotnego są porównywane w komparatorze fazy z impulsami z oscylatora. Dzięki temu oscylator jest sterowany w ten sposób, źc jego sygnał wyjściowy jest przesunięty w fazie w stosunku do impulsów silnika, przy czym nie może to spowodować opuszczania skoków.
Po osiągnięciu przez silnik swojej końcowej prędkości układ regulacji prędkości powoduje odłączenie sprzężenia zwrotnego od oscylatora i silnik pracuje ze stałą częstotliwością wejściową.
Zaletą tego układu jest jego przydatność w urządzeniach ze sterowaniem numerycznym, gdyż silnik skokowy jest typowym siłownikiem cyfrowym.
Porównując rozpatrywany układ z serwonapędem prądu stałego można stwierdzić, że dokładność tego ostatniego jest określona przez czułość i przesunięcie fazowe pętłi sprzężenia zwrotnego, natomiast w przypadku silnika skokowego położenie końcowe wirnika może być określone z dokładnością ok. 3% przyrostu wartości skoku [141],
Silnik skokowy w układzie zamkniętym nie wymaga specjalnego hamowania mechanicznego, gdyż ma on z reguły rozwiązany problem tłumienia.
Prąd rozruchowy w silniku skokowym jest prawie taki sam jak prąd w stanie ustalonym, natomiast w serwonapędzie prądu stałego ma on dużą wartość. Straty mocy w obu przypadkach są porównywalne. Moment jednostkowy silnika wykonawczego prądu stałego ma na ogół wartość od 28 do 70mN*m/A, natomiast silnika skokowego — od 280 do 1120mN-m/A [141].
Jednakże — z powodu stosunkowo dużej indukcyjności silnika skokowego, która wynosi na ogół 10-^-80 mH (w porównaniu z L — 0,1 -r- lmH w przypadku silnika prądu stałego) — w układzie silnika skokowego musi być włączona szeregowo duża rezystancja w celu zapewnienia porównywalności stałych czasowych w obu przypadkach.
inne rozwiązanie układu do sterowania silnika skokowego ze sprzężeniem zwrotnym prędkościowym i położeniowym, zaproponowane w pracy [133], przedstawiono na rys. 7.5.
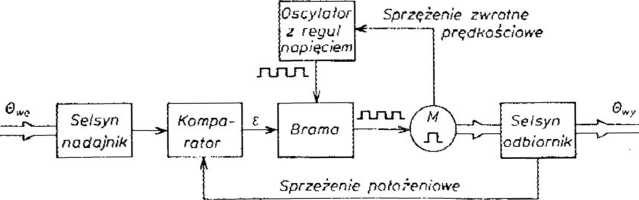
Rys. 7.5. Układ zamknięty sterowania silnika skokowego ze sprzężeniem zwrotnym prędkościowym i położeniowym
Wyszukiwarka
Podobne podstrony:
66208 instalacje154 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 188 Rys. 7.8. Układ sterowania silnika skokow
instalacje150 7. Zastosowania silników skokowych7.1. Porównanie napędów z silnikam
instalacje153 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 186 Sprzężenie zwrotne prędkościowe, dzięki sygnało
instalacje156 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 192 7.2.2. Napędy urządzeń do pisania Do grupy urzą
instalacje157 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 194 — do obrotu wałka (silnik Y);
instalacje159 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 198 Rys. 7.16. Schemat pracy skanera termalnego z e
instalacje160 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 200 a = 1 13 "32 stopnia i będzie przeszukiwa
instalacje161 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 202 Rys. 7.19. Schemat automatu do badania elementó
instalacje162 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 204 myślę chemicznym [152]. Uproszczony schemat nap
instalacje163 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 206 naprowadzanie ich na pożądany cel. Na przykład
instalacje151 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 182 rotowy może zmaleć czterokrotnie [138]. Silnik
instalacje158 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 196 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 196 Rys. 7.1
więcej podobnych podstron