instalacje157

7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 194
— do obrotu wałka (silnik Y);
— do podnoszenia i opuszczania pisaka oraz zmiany jego koloru.
Wszystkie zastosowane w tym ploterze silniki mają kąt skoku 18° i są zasilane z zasilacza o napięciu 5 V. Częstotliwość pracy wynosi 300 Hz. Moment obrotowy jest przenoszony od silników do mechanizmu piszącego przez przekładnie zębate.
7.2.3. Napędy reaktorów jądrowych
Do podstawowych układów napędowych reaktorów jądrowych należą układy sterowania i zabezpieczeń awaryjnych. Sterowanie przebiegiem reakcji w reaktorze odbywa się za pomocą prętów regulacyjnych, wykonanych z materiału silnie pochłaniającego neutrony, które są wsuwane lub wysuwane z rdzenia. Ruch prętów pochłaniających odbywa się dzięki elementom wykonawczym seiwonapędćw — silnikom elektrycznym, sterowanym automatycznie, wśród których znaczące miejsce mają silniki skokowe. Są stosowane silniki skokowe w układzie otwartym, zapewniając) m prostotę sterowania.
Wiele czynników decyduje o zastosowaniu silników skokowych w serwonapędach reaktorów jądrowych; przy ich zastosowaniu zmniejsza się liczba przekładni zębatych, stosunkowo łatwo można je wykonać o budowie hcimctycznej, pracują one przy małej prędkości obrotowej (od kilku do kilkuset min-1), nie wymagają specjalnych łożysk.
Stosowane są między innymi wielosekcyjne silniki skokowe o wirniku reluktancyjnym, który może pracować w agresywmym środowisku, nie mając uzwojenia na wirniku. Liczba zębów' wirnika może wynosić od kilku do kilkunastu. Silniki w'ielosekcyjne charakteryzują się dużym W)miaręm osiow)m i małą średnicą, co jest korzystne, gdyż na pokrywie zbiornika reaktora trzeba umieścić wiele elementów elektromaszynowych, więc nic mogą one mieć dużych średnic.
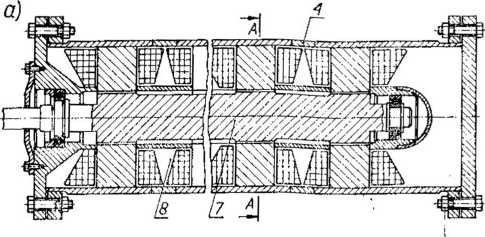
Typowy przykład hermetycznego silnika skokowego, stosowanego w' napędach reaktorów jądrowych, przedstawiono na rys. 7.13. Jest to silnik o czterech sekcjach, których wirniki reluktancyjne 3 są umieszczone na wspólnym walc 7 i obrócone względem siebie o kąt równy wartości skoku. Każdy z wirników ma liczbę zębów Zr = 4. Na stojanic każdej sekcji znajdują się cztery pasma uzwojenia skupionego 5. Rura z niemagnetycznej stali 2 oddziela środowisko agresywne, w którym znajduje się wirnik silnika. Strumień magnetyczny zamyka się w jarzmie silnika 6.
7 2 3
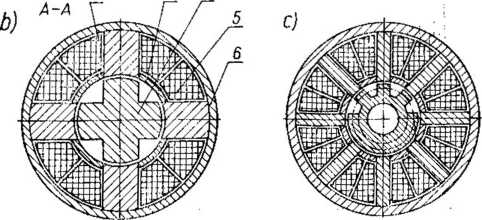
Rys. 7.13. Hermetyczny, czterosckcyjny silnik skokowy
1 — biegun stojana; 2 — rura oddzielająca z niemagnetycznej stali; 3 — wirnik reluk-tancyjoy; 4 — pierścień niemagnetyczny; 5 — uzwojenie stojana; 6 — jarzmo silnika; 7 — wal; 8 — przestrzeń wewnętrzna stojana, zwykle wypełniona składnikiem o dobrej przewodności cieplnej
Wartość skoku silnika wielosekcyjnego o czterech sekcjach i czterech zębach wirnika
a
360° Zr m
360
4-4
22,5°
(7.1)
gdzie m — liczba sekcji.
Elektroniczny układ sterowania zasila uzwojenia poszczególnych sekcji impulsami o zadanej kolejności, powodując skokowy ruch obrotowy wirnika. Przy dużej częstotliwości impulsów ruch skokowy przechodzi praktycznie w płynny. Przebiegi zmian prądu w uzwojeniach stojana czte-rosekcyjnego silnika przedstawia rys. 7.14.
Trzeba podkreślić, że zaletą silnika skokowego jest możliwość natychmiastowego zatrzymania wirnika, co w napędach reaktorów jest warunkiem koniecznym.
13*
Wyszukiwarka
Podobne podstrony:
instalacje156 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 192 7.2.2. Napędy urządzeń do pisania Do grupy urzą
instalacje161 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 202 Rys. 7.19. Schemat automatu do badania elementó
instalacje150 7. Zastosowania silników skokowych7.1. Porównanie napędów z silnikam
instalacje152 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 184 dów sterowania z silnikami skokowymi o znacznie
instalacje153 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 186 Sprzężenie zwrotne prędkościowe, dzięki sygnało
instalacje159 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 198 Rys. 7.16. Schemat pracy skanera termalnego z e
instalacje160 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 200 a = 1 13 "32 stopnia i będzie przeszukiwa
instalacje162 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 204 myślę chemicznym [152]. Uproszczony schemat nap
instalacje163 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 206 naprowadzanie ich na pożądany cel. Na przykład
instalacje151 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 182 rotowy może zmaleć czterokrotnie [138]. Silnik
instalacje158 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 196 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 196 Rys. 7.1
więcej podobnych podstron