instalacje094

X STEROWANIE SILNIKÓW SKOKOWYCH 70
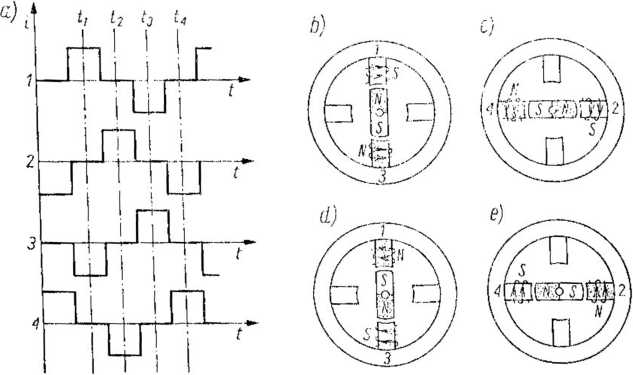
Rys. 3.2. Komutacja symetryczna silnika skokowego: a) cyklogram przebiegu impulsów w pasmach 1 -2-3-4; b, c, d, e) położenia wirnika w chwilach tu t2, t3,
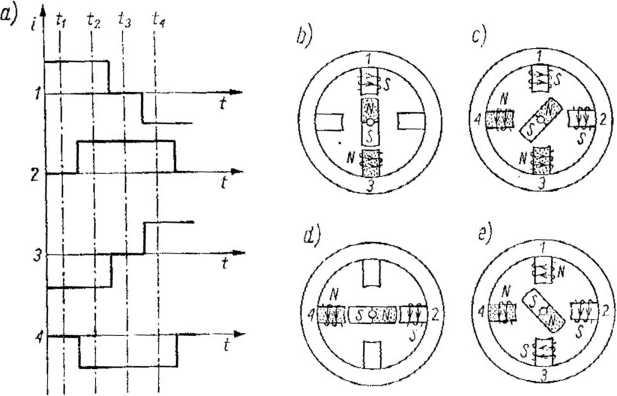
Rys. 3.3. Komutacja niesymetryczna silnika skokowego: a) cyklogram przebiegu impulsów; b, c, d, e) położenia wirnika w chwilach tu h, U
Na przykład przy typowej wartości kąta cts — 1,3° i częstotliwości /= 20 000 skoków/s otrzymuje się wartość prędkości obrotowej 6 000 min-1. Również przy / = 100 000 skoków/s, lecz przy kącie skoku 0,36°, prędkość obrotowa wynosi 6 000 min-1.
Kąt skoku nawet tego samego silnika może być różny w zależności od wytworzonego przez układ elektroniczny programu sterowania co ilustruje zestawienie rys. 3.2 i 3.3. Na rysunku 3.2a pokazano cyklogram sterowania dwubiegunowego silnika skokowego o magnesach trwałych na wirniku (przebiegi czasowe prądu w poszczególnych pasmach uzwojenia), na rys. 3.2b, c, d, e zaś — położenia wirnika w czasie tu t2> *3, *4- W celu uproszczenia rysunków na każdym z nich pokazano tylko to pasmo uzwojenia, które w danej chwili jest zasilane impulsem prądowym. Komutację według przedstawionego na rys. 3.2 schematu zasilania impulsami nazwano symetryczną. Jak widać z rys. 3.2 kąt skoku wynosi 90°.
Ten sam silnik, zasilany impulsami według sekwencji przedstawionej na rys. 3.3a, wykonuje pracę półskokową. W położeniach przedstawionych na rys. 3.3c, e impulsy prądowe są jednocześnie podawane na wszystkie pasma uzwojenia i w rezultacie działania wytworzonego pola magnetycznego wirnik zatrzymuje się w położeniu pośrednim, po przemieszczeniu o kąt skoku wynoszący 45°. Tego rodzaju komutację nazwano niesymetryczną.
Przez odpowiednie zaprojektowanie układu sterowania można również uzyskać pracę miniskokową, polegającą na tym, że silnik wykonuje w granicach jednego skoku bazowego pewną liczbę miniskoków o bardzo małej wartości (rzędu setnych, a nawet tysięcznych części stopnia). Takie rozwiązanie może zapewnić uzyskanie do 50 000 skoków na obrót, przy momencie obrotowym 0,25-r-5N-m.
3.2. Sterowanie bipolarne i unipolarne dwupasmowych silników skokowych
Sterowanie bipolarne, przy którym całe pasmo uzwojenia bierze jednocześnie udział w pracy (rys. 3.4a, c), oraz unipolarne, przy którym jednocześnie jest włączona tylko połowa pasma (rys. 3.4b, d), stanowią podstawowe sposoby sterowania dwupasmowych silników skokowych.
Na rysunku 3.4a, b przedstawiono poglądowo sposób przełączania uzwojeń przy sterowaniu bipolarnym (a) i unipolarnym (b), na rys.
Wyszukiwarka
Podobne podstrony:
instalacje093 3. Sterowanie silników skokowych3.1. Komutacja symetryczna i niesymetryczna silnika sk
instalacje098 3. STEROWANIE SILNIKÓW SKOKOWYCH 78 wartość maksymalną, to wyłącznik W (rys. 3.9b) zos
instalacje103 3. STEROWANIE SILNIKÓW SKOKOWYCH 88 Rys. 3.17. Mikroprocesorowy układ sterowania silni
instalacje102 3. STEROWANIE SILNIKÓW SKOKOWYCH 85 mable Read Only Memory). Na wyjściu układu PROM je
instalacje096 3. STEROWANIE SILNIKÓW SKOKOWYCH 74 kiem rezonansu, który występuje przy określonej cz
65281 instalacje097 3. STEROWANIE SILNIKÓW SKOKOWYCH 76 >
75846 instalacje100 3. STEROWANIE SILNIKÓW SKOKOWYCH 82 58; 63]. Idea sterowania miniskokowego powst
więcej podobnych podstron