65281 instalacje097

3. STEROWANIE SILNIKÓW SKOKOWYCH 76
> 1 2 3 4 5
a) a+B' A+B/2' a A+Bfz A+B


Rys. 3.8. Wykres wektorowy (a) i cyklogram przebiegu impulsów (b) dla pracy ćwierćskokowcj dwupasmowego silnika skokowego przy sterowaniu unipolarnym (wg [55J) ______
i
wirnik położenia pośredniego pomiędzy dwoma położeniami pólskoko-wymi, dzięki możliwości zasilania jednego całego pasma i połowy drugiego, co jest możliwe (jak wynika to z rys. 3.4) przy sterowaniu unipolarnym.
Jest to widoczne na wykresie wektorowym przy pracy ćwicrćsko-kowej (rys. 3.8a) w położeniach 2,4,6,8,10,12,14 i 16. Odpowiednie przebiegi prądowe dla pracy ł/4-skokowej przedstawiono na rys. 3.8b. Pełny obrót wirnika składa się z 16 skoków. Przy pracy 1/4-skokowej następuje dalsze ograniczenie rezonansu.
Praca miniskokowa, przy której skok bazowy może być podzielony na dużą liczbę (do 100) miniskoków o bardzo małej wartości, będzie rozpatrzona oddzielnie.
3.3. Porównanie różnych układów sterowania
Rozważone będą układy sterowania: z rezystorem ograniczającym oraz z przerywaczem elektronicznym (ang. chopper).
Uzwojenie silnika skokowego ma małą rezystancję, więc dla uzyskania prądu znamionowego wystarczająca jest nieduża wartość przyłączonego napięcia. Ma to znaczenie jedynie w spoczynku lub przy małych prędkościach obrotowych. W przypadku dużej częstotliwości skoków wzrost prędkości zmian prądu w uzwojeniach nie nadąża za szybkością zmian impulsów. W związku z tym musi być zwiększone napięcie — zachodzi zatem konieczność ograniczania czasu narastania prądu w uzwojeniu, co można realizować przez zastosowanie rezystora ograniczającego Rs (rys. 3.9a) lub przerywacza elektronicznego (rys. 3.9b). Zasadę obu sposobów zmniejszania stałej czasowej ilustruje rys. 3.9.
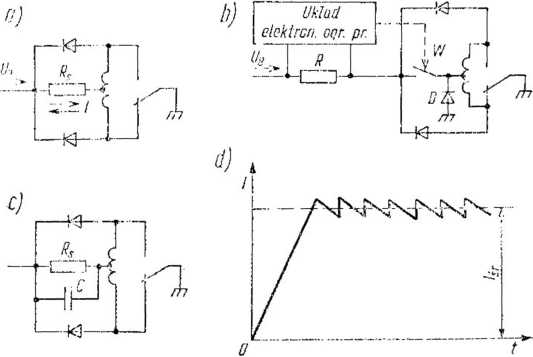
Rys. 3.9. Ograniczanie prądu w uzwojeniu silnika skokowego przy sterowaniu unipolarnym: a) przez zastosowanie rezystora ograniczającego /?,; b) za pomocą przerywacza elektronicznego; c) przez zastosowanie rezystora R, i kondensatora C; d) przebieg prądu przy stosowaniu przerywacza eiektronic/nego (blok EOF)
Opisane postępowanie nazywa się niekiedy forsowaniem (ang. forcing) [43]. a rezystor Rs rezystorem forsującym.
Działanie układu z przerywaczem elektronicznym jest następujące. Spadek napięcia na rezystancji R jest mierzony i porównywany z napięciem odniesienia w urządzeniu elektronicznym. Jeżeli osiągnie on
Wyszukiwarka
Podobne podstrony:
instalacje094 X STEROWANIE SILNIKÓW SKOKOWYCH 70 Rys. 3.2. Komutacja symetryczna silnika skokowego:
instalacje098 3. STEROWANIE SILNIKÓW SKOKOWYCH 78 wartość maksymalną, to wyłącznik W (rys. 3.9b) zos
instalacje102 3. STEROWANIE SILNIKÓW SKOKOWYCH 85 mable Read Only Memory). Na wyjściu układu PROM je
instalacje093 3. Sterowanie silników skokowych3.1. Komutacja symetryczna i niesymetryczna silnika sk
instalacje096 3. STEROWANIE SILNIKÓW SKOKOWYCH 74 kiem rezonansu, który występuje przy określonej cz
instalacje103 3. STEROWANIE SILNIKÓW SKOKOWYCH 88 Rys. 3.17. Mikroprocesorowy układ sterowania silni
75846 instalacje100 3. STEROWANIE SILNIKÓW SKOKOWYCH 82 58; 63]. Idea sterowania miniskokowego powst
więcej podobnych podstron