instalacje102
3. STEROWANIE SILNIKÓW SKOKOWYCH 85
mable Read Only Memory). Na wyjściu układu PROM jest drugi przetwornik cyfrowo-analogowy P2, na wyjściu którego otrzymuje się przebieg prądu i2. Oba przebiegi iv oraz i2 są identyczne, lecz przesunięte względem siebie w fazie o kąt 90°.
W celu zapewnienia nawrotu silnika skokowego fazy i P2 muszą być odwrócone, co osiąga się dzięki dwuwejściowej bramce „exclusive” OR z przerzutnikiem dwustanowym. Prędkość wirowania silnika skokowego zależy od częstotliwości prądów it oraz i2, które z kolei są zależne
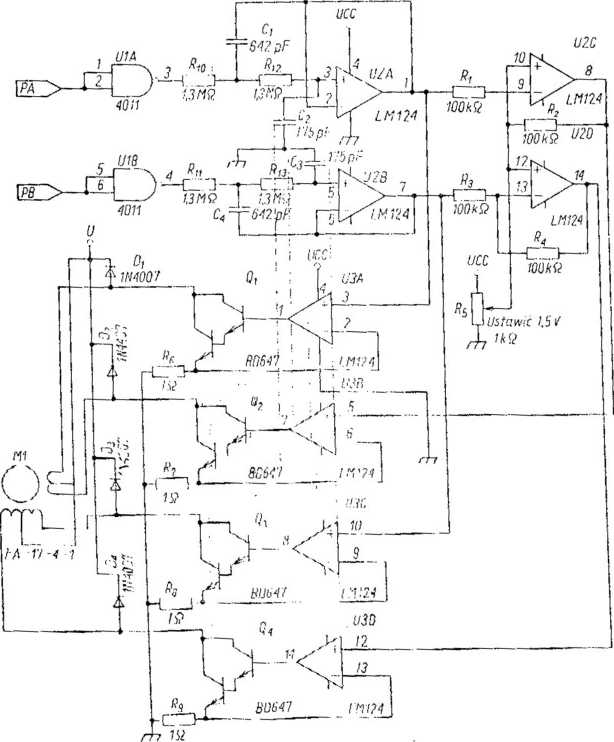
Rys. 3.16. Prądowy wzmacniacz mocy do pracy miniskokowej (wg [461)
od częstotliwości impulsów podawanych do licznika. Do wytwarzania impulsów służy generator impulsów o zmiennej częstotliwości. Opisany układ jest w stanie pracować z częstotliwością do I MHz. W praktyce jednak częstotliwość jest ograniczona przez możliwości silnika skokowego. W eksploatowanych silnikach maksymalna częstotliwość miniskoków wynosi ok. 100 kHz, co odpowiada 1600 skokom bazowym/s lub 8 obr/s [63].
W celu wyeliminowania nieliniowości w obu pasmach uzwojenia silnika skokowego można stosować układ udoskonalony, zawierający układy programowanej pamięci stałej dla obu pasm (PROM-1) i (PROM-2). PROM-1 jest wówczas układem głównym „master”, a PROM-2 podporządkowanym „slave’\
Również w Polsce opracowano układ sterowania miniskokowego dwupasmowego silnika skokowego, pracującego przy unipolarnym zasilaniu pasm uzwojenia [46], Układ jest przeznaczony do pracy napięciowej i prądowej. Na rysunku 3.14 przedstawiono schemat sterownika miniskokowego wg [46], na rys. 3.15 napięciowego wzmacniacza mocy, a na rys. 3.16 prądowego wzmacniacza mocy.
Trzeba zwrócić uwagę, że przy pracy miniskokowej występuje niekorzystne zjawisko pulsacji maksymalnego momentu synchronizującego w ramach jednego skoku bazowego, które powoduje zmniejszenie wartości maksymalnego momentu obciążenia, w związku z czym powinno być ograniczane.
3.4.3. Mikroprocesorowe sterowanie
Nowoczesne układy sterowania silników skokowych są przeważnie układami z zastosowaniem mikroprocesorów [44; 47; 61]. Procesorem nazywa się część komputera, w której odbywa się przetwarzanie i która zawiera elementy sterujące oraz elementy działań arytmetycznych i logicznych.
Rolę mikroprocesora w nowoczesnym układzie sterowania silnika skokowego można objaśnić na przykładzie jednego z patentów [42], który dotyczy układu sterowania silnika skokowego oraz metody wykrywania błędó\v w pracy układu.
Mikroprocesorowy układ sterowania silnika skokowego przedstawiono na rys. 3.17. Układ zawiera mikrokomputer, złożony z mikro-
Wyszukiwarka
Podobne podstrony:
instalacje094 X STEROWANIE SILNIKÓW SKOKOWYCH 70 Rys. 3.2. Komutacja symetryczna silnika skokowego:
instalacje098 3. STEROWANIE SILNIKÓW SKOKOWYCH 78 wartość maksymalną, to wyłącznik W (rys. 3.9b) zos
instalacje093 3. Sterowanie silników skokowych3.1. Komutacja symetryczna i niesymetryczna silnika sk
instalacje096 3. STEROWANIE SILNIKÓW SKOKOWYCH 74 kiem rezonansu, który występuje przy określonej cz
instalacje103 3. STEROWANIE SILNIKÓW SKOKOWYCH 88 Rys. 3.17. Mikroprocesorowy układ sterowania silni
65281 instalacje097 3. STEROWANIE SILNIKÓW SKOKOWYCH 76 >
75846 instalacje100 3. STEROWANIE SILNIKÓW SKOKOWYCH 82 58; 63]. Idea sterowania miniskokowego powst
więcej podobnych podstron