instalacje093
3. Sterowanie silników skokowych
3.1. Komutacja symetryczna i niesymetryczna silnika skokowego
Silnik skokowy przetwarza ciąg sterujących impulsów elektrycznych na ciąg kątowych przemieszczeń wału wokół jego osi. Jest to więc silnik o działaniu dyskretnym.
Konwencjonalny silnik elektryczny prądu stałego lub przemiennego o wejściu i wyjściu analogowym nie wymaga stosowania elektronicznego układu sterowania. Układy takie, znacznie polepszające jego właściwości, są wytworem ostatnich lat. Natomiast silnik skokowy nie może pracować bez elektronicznego układu sterowania, jeśli nie brać pod uwagę jakiegoś prymitywnego sposobu wytwarzania impulsów sterujących.
Rozpatrując właściwości silnika skokowego trzeba brać pod uwagę silnik wraz z układem sterowania — jako całość. Rozpatrywanie samego tylko silnika daje obraz dalece niepełny. Układ sterowania odgrywa bowiem decydującą rolę w kształtowaniu korzystnych charakterystyk silniku skokowego. Zasadniczy rozwój silników skokowych zmierza w kierunku zwiększenia liczby skoków, momentu obrotowego i sprawności, a zmniejszenia inercji mechanicznej.
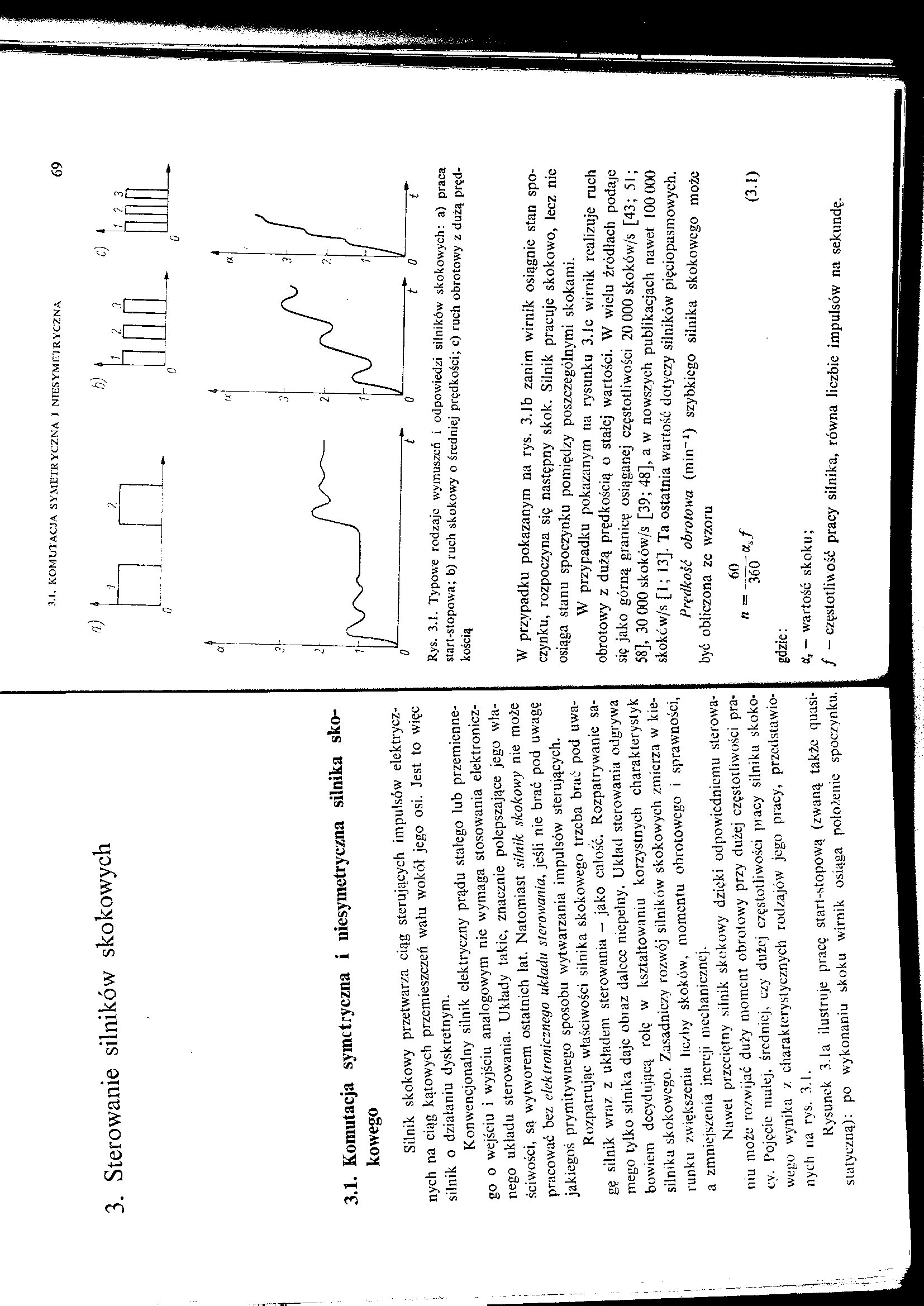
Nawet przeciętny silnik skokowy dzięki odpowiedniemu sterowaniu może rozwijać duży moment obrotowy przy dużej częstotliwości pracy. Pojęcie mulej, średniej, czy dużej częstotliwości pracy silnika skokowego wynika z charakterystycznych rodzajów jego pracy, przedstawionych na rys. 3.1.
Rysunek 3.la ilustruje pracę start-stopową (zwaną także quasi-statyezną): po wykonaniu skoku wirnik osiąga położenie spoczynku.

i
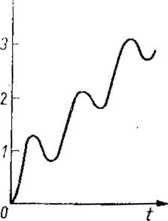
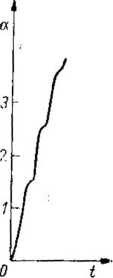
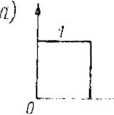
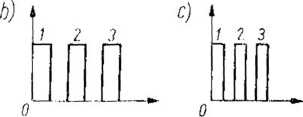
Rys. 3.1. Typowe rodzaje wymuszeń i odpowiedzi silników skokowych: a) praca start-stopowa; b) ruch skokowy o średniej prędkości; c) ruch obrotowy z dużą prędkością
W przypadku pokazanym na rys. 3.Ib zanim wirnik osiągnie stan spoczynku, rozpoczyna się następny skok. Silnik pracuje skokowo, lecz nie osiąga stanu spoczynku pomiędzy poszczególnymi skokami.
W przypadku pokazanym na rysunku 3.1c wirnik realizuje ruch obrotowy z dużą prędkością o stałej wartości. W wielu źródłach podaje się jako górną granicę osiąganej częstotliwości 20 000 skoków/s [43; 51; 58], 30 000 skoków/s [39; 48], a w nowszych publikacjach nawet 100 000 skokćw/s [1; 13], Ta ostatnia wartość dotyczy silników pięciopasmowych.
Prędkość obrotowa (min-1) szybkiego silnika skokowego może być obliczona ze wzoru
*"1 (3I)
gdzie:
ot5 — wartość skoku;
/ — częstotliwość pracy silnika, równa liczbie impulsów na sekundę.
Wyszukiwarka
Podobne podstrony:
instalacje094 X STEROWANIE SILNIKÓW SKOKOWYCH 70 Rys. 3.2. Komutacja symetryczna silnika skokowego:
instalacje098 3. STEROWANIE SILNIKÓW SKOKOWYCH 78 wartość maksymalną, to wyłącznik W (rys. 3.9b) zos
instalacje102 3. STEROWANIE SILNIKÓW SKOKOWYCH 85 mable Read Only Memory). Na wyjściu układu PROM je
instalacje096 3. STEROWANIE SILNIKÓW SKOKOWYCH 74 kiem rezonansu, który występuje przy określonej cz
instalacje103 3. STEROWANIE SILNIKÓW SKOKOWYCH 88 Rys. 3.17. Mikroprocesorowy układ sterowania silni
65281 instalacje097 3. STEROWANIE SILNIKÓW SKOKOWYCH 76 >
75846 instalacje100 3. STEROWANIE SILNIKÓW SKOKOWYCH 82 58; 63]. Idea sterowania miniskokowego powst
więcej podobnych podstron