instalacje096
3. STEROWANIE SILNIKÓW SKOKOWYCH 74
kiem rezonansu, który występuje przy określonej częstotliwości. Naniesiona na tym rysunku krzywa 5 dotyczy układu z dodatkową rezystancją i pojemnością. Rysunek uwidacznia korzyści, jakie daje wybór właściwego układu sterowania.
Inna korzyść, wynikająca ze stosowania sterowania bipolarnego lub unipolarnego, polega na możliwości zmniejszania wartości skoku silnika. Przez odpowiednie przełączenie uzyskuje się pracę: pełnoskokową, półskokową lub ćwierćskokową, co zostanie zilustrowane wykresami wektorowymi i cyklogramami przebiegów prądowych w pasmach uzwojenia silnika.
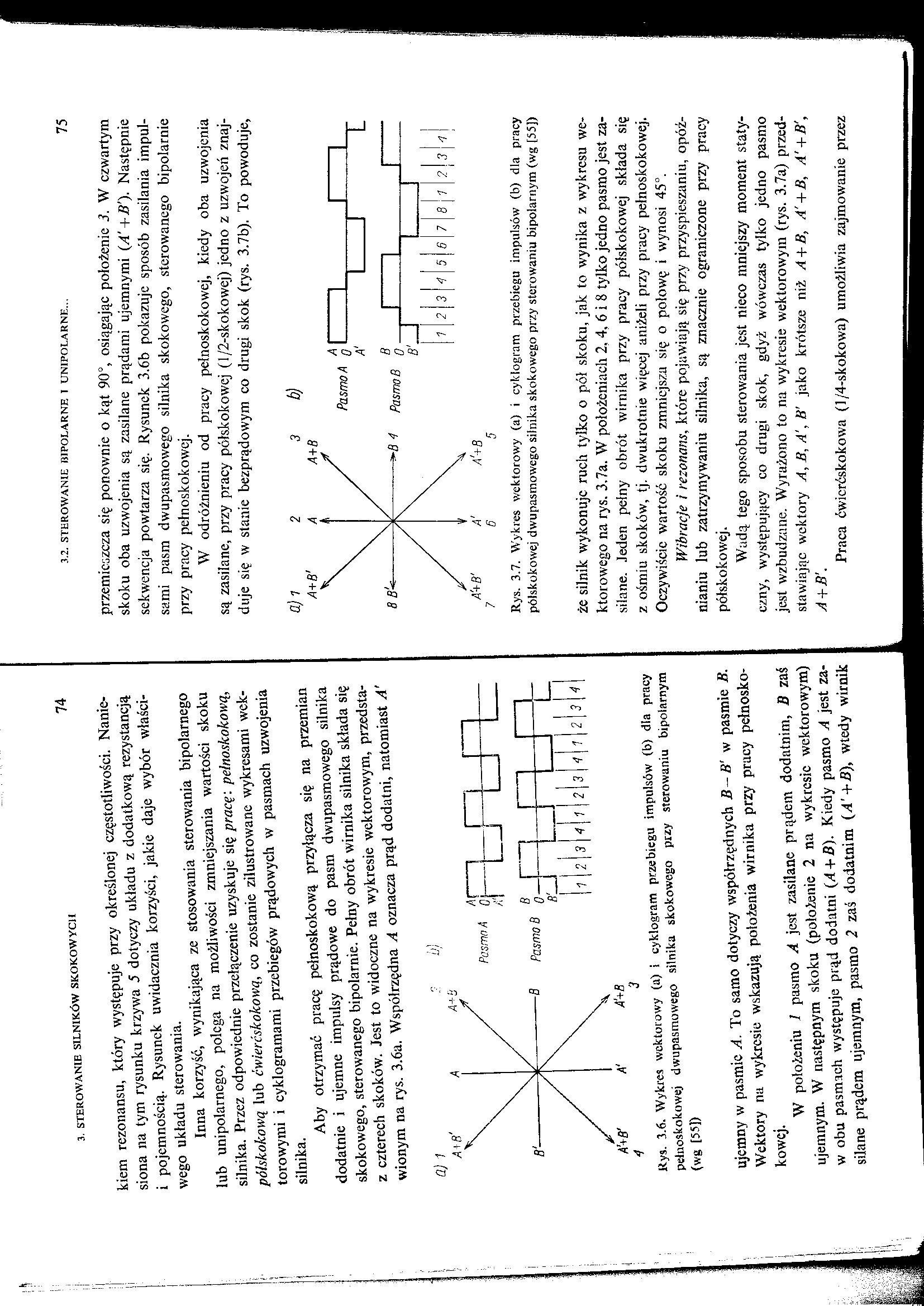
Aby otrzymać pracę pełnoskokową przyłącza się na przemian dodatnie i ujemne impulsy prądowe do pasm dwupasmowego silnika skokowego, sterowanego bipolarnie. Pełny obrót wirnika silnika składa się z czterech skoków. Jest to widoczne na wykresie wektorowym, przedstawionym na rys. 3.6a. Współrzędna A oznacza prąd dodatni, natomiast A'
a) 1 ;
MB' A A+3
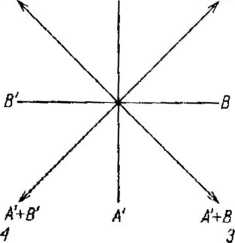
Rys. 3.6. Wykres wektorowy (a) i cyklogram przebiegu impulsów (b) dla pracy pelnoskokowej dwupasmowego silnika skokowego przy sterowaniu bipolarnym (wg [55])
ujemny w paśmie A To samo dotyczy współrzędnych B-B' w paśmie B. Wektory na wykresie wskazują położenia wirnika przy pracy pełnosko-kowej.
W położeniu 1 pasmo A jest zasilane prądem dodatnim, B zaś ujemnym. W następnym skoku (położenie 2 na wykresie wektorowym) w obu pasmach występuje prąd dodatni (/4 + i?). Kiedy pasmo A jest zasilane prądem ujemnym, pasmo 2 zaś dodatnim (A'+B), wtedy wirnik przemieszcza się ponownie o kąt 90°, osiągając położenie 3. W czwartym skoku oba uzwojenia są zasilane prądami ujemnymi (A' + B'). Następnie sekwencja powtarza się. Rysunek 3.6b pokazuje sposób zasilania impulsami pasm dwupasmowego silnika skokowego, sterowanego bipolarnie przy pracy pelnoskokowej.
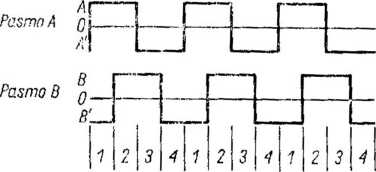
W odróżnieniu od pracy pelnoskokowej, kiedy oba uzwojenia są zasilane, przy pracy półskokowej (1/2-skokowej) jedno z uzwojeń znajduje się w stanie bezprądowym co drugi skok (rys. 3.7b). To powoduje,
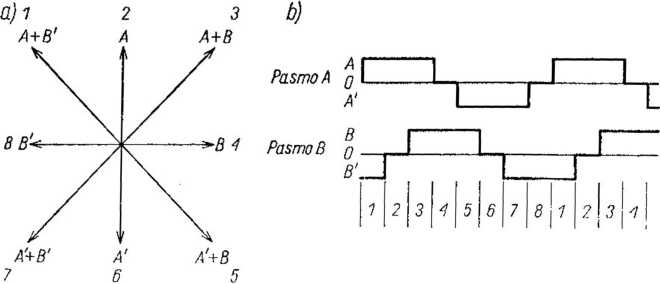
Rys. 3.7. Wykres wektorowy (a) i cyklogram przebiegu impulsów (b) dla pracy półskokowej dwupasmowego silnika skokowego przy sterowaniu bipolarnym (wg [55])
że silnik wykonuje ruch tylko o pół skoku, jak to wynika z wykresu wektorowego na rys. 3,7a. W położeniach 2, 4, 6 i B tylko jedno pasmo jest zasilane. Jeden pełny obrót wirnika przy pracy półskokowej składa się z ośmiu skoków, tj. dwukrotnie więcej aniżeli przy pracy pelnoskokowej. Oczywiście wartość skoku zmniejsza się o połowę i wynosi 45°.
Wibracje i rezonans, które pojawiają się przy przyspieszaniu, opóźnianiu lub zatrzymywaniu silnika, są znacznie ograniczone przy pracy półskokowej.
Wadą tego sposobu sterowania jest nieco mniejszy moment statyczny, występujący co drugi skok, gdyż wówczas tylko jedno pasmo jest wzbudzane. Wyrażono to na wykresie wektorowym (rys. 3.7a) przedstawiając wektory jako krótsze niż A + B, A' + B, A' + B',
A+B’.
Praca ćwicrćskokowa (1/4-skokowa) umożliwia zajmowanie przez
Wyszukiwarka
Podobne podstrony:
instalacje094 X STEROWANIE SILNIKÓW SKOKOWYCH 70 Rys. 3.2. Komutacja symetryczna silnika skokowego:
instalacje098 3. STEROWANIE SILNIKÓW SKOKOWYCH 78 wartość maksymalną, to wyłącznik W (rys. 3.9b) zos
instalacje102 3. STEROWANIE SILNIKÓW SKOKOWYCH 85 mable Read Only Memory). Na wyjściu układu PROM je
instalacje093 3. Sterowanie silników skokowych3.1. Komutacja symetryczna i niesymetryczna silnika sk
instalacje103 3. STEROWANIE SILNIKÓW SKOKOWYCH 88 Rys. 3.17. Mikroprocesorowy układ sterowania silni
65281 instalacje097 3. STEROWANIE SILNIKÓW SKOKOWYCH 76 >
75846 instalacje100 3. STEROWANIE SILNIKÓW SKOKOWYCH 82 58; 63]. Idea sterowania miniskokowego powst
więcej podobnych podstron