instalacje142
6. BADANIA SILNIKÓW SKOKOWYCH 164
żenie wirnika. Można zaobserwować, że charakterystyka Mst max = f (/) silnika hybrydowego jest zbliżona do liniowej; podobnie jak silnika o magnesach trwałych.
6.3. Wyznaczanie wielkości i charakterystyk dynamicznych
6.3.1. Wyznaczanie charakterystyk rozruchowych Mt — f(/rmax)
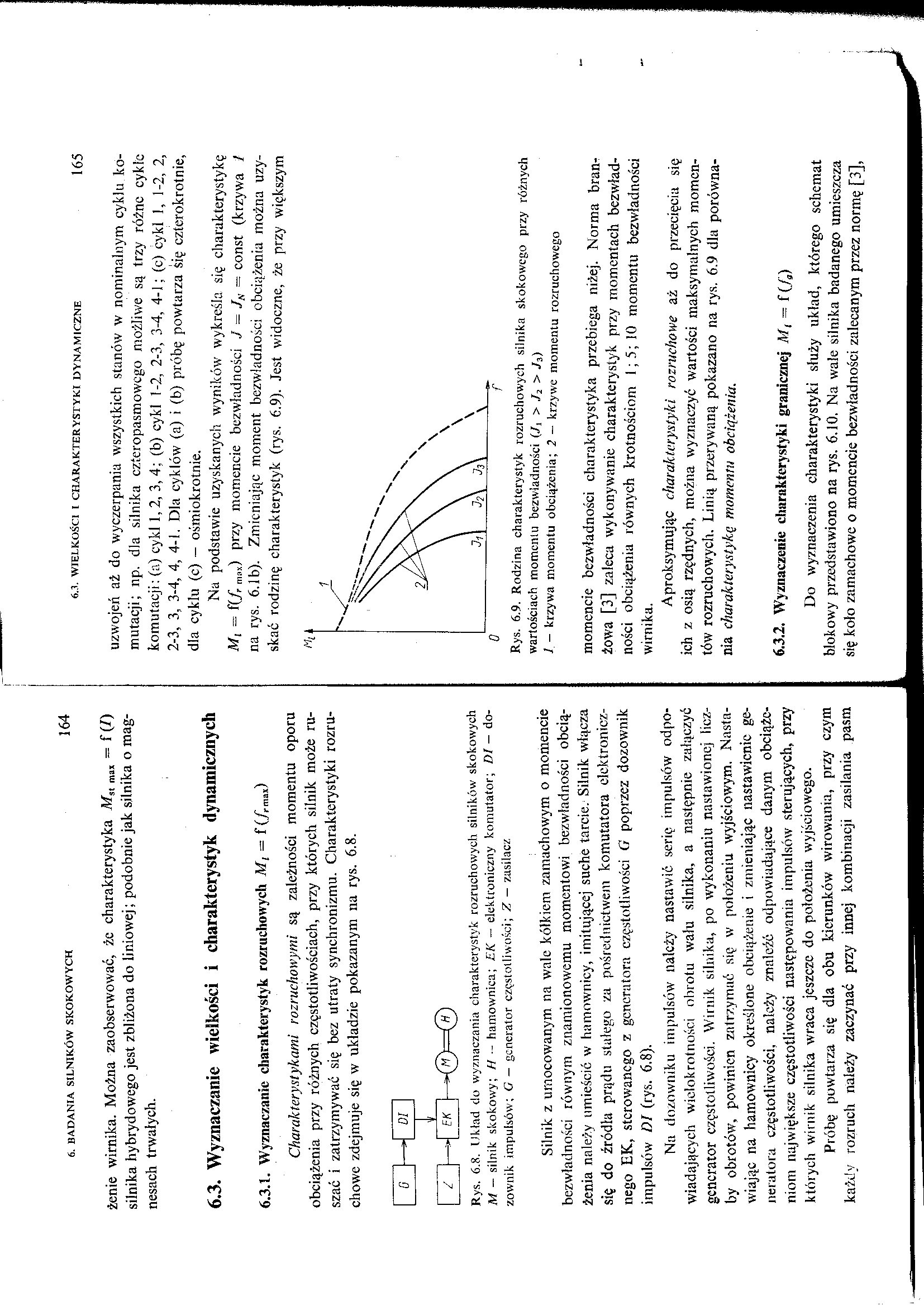
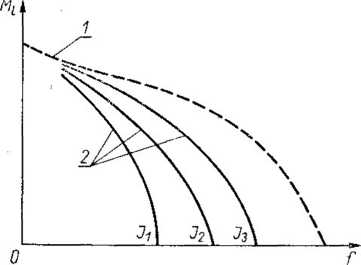
Charakterystykami rozruchowymi są zależności momentu oporu obciążenia przy różnych częstotliwościach, przy których silnik może ruszać i zatrzymywać się bez utraty synchronizmu. Charakterystyki rozruchowe zdejmuje się w układzie pokazanym na rys. 6.8.
Rys. 6.8. Układ do wyznaczania charakterystyk rozruchowych silników skokowych M — silnik skokowy; H — hamownica; EK — elektroniczny komutator; Dl — dozownik impulsów; G — generator częstotliwości; Z — zasilacz
Silnik z umocowanym na wale kółkiem zamachowym o momencie bezwładności równym znamionowemu momentowi bezwładności obciążenia należy umieścić w ha mównicy, imitującej suche tarcie. Silnik włącza się do źródła prądu stałego za pośrednictwem komutatora elektronicznego EK, sterowanego z generatora częstotliwości G poprzez dozownik impulsów DI (rys. 6.8).
Na dozowniku impulsów należy nastawić serię impulsów odpowiadających wielokrotności obrotu wału silnika, a następnie załączyć generator częstotliwości. Wirnik silnika, po wykonaniu nastawionej liczby obrotów, powinien zatrzymać się w położeniu wyjściowym. Nastawiając na hamownicy określone obciążenie i zmieniając nastawienie generatora częstotliwości, należy znaleźć odpowiadające danym obciążeniom największe częstotliwości następowania impulsów sterujących, przy których wirnik silnika wraca jeszcze do położenia wyjściowego.
Próbę powtarza się dla obu kierunków wirowania, przy czym każdy rozruch należy zaczynać przy innej kombinacji zasilania pasm uzwojeń aż do wyczerpania wszystkich stanów w nominalnym cyklu komutacji; np. dla silnika czteropasmowcgo możliwe są trzy różne cykle komutacji: (a) cykl 1,2, 3,4; (b) cykl 1-2, 2-3, 3-4, 4-1; (c) cykl 1, 1-2, 2, 2-3, 3, 3-4, 4, 4-1. Dla cyklów (a) i (b) próbę powtarza śię czterokrotnie, dla cyklu (c) — ośmiokrotnie.
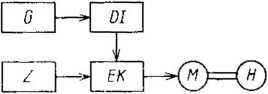
Na podstawie uzyskanych wyników wykreśla się charakterystykę Mt = f|(fr m3X) przy momencie bezwładności J ~ JN = const (krzywa 1 na rys. 6.Ib). Zmieniając moment bezwładności obciążenia można uzyskać rodzinę charakterystyk (rys. 6.9). Jest widoczne, że przy większym
Rys. 6.9. Rodzina charakterystyk rozruchowych silnika skokowego przy różnych wartościach momentu bezwładności {J1 > J2 > J2)
1 — krzywa momentu obciążenia; 2 — krzywe momentu rozruchowego
momencie bezwładności charakterystyka przebiega niżej. Norma branżowa [3] zaleca wykonywanie charakterystyk przy momentach bezwładności obciążenia równych krotnościom 1; 5; 10 momentu bezwładności wirnika.
Aproksymując charakterystyki rozruchowe aż do przecięcia się ich z osią rzędnych, można wyznaczyć wartości maksymalnych momentów rozruchowych. Linią przerywaną pokazano na rys. 6.9 dla porównania charakterystykę momentu obciążenia.
6.3.2. Wyznaczenie charakterystyki granicznej M( — f (fg)
Do wyznaczenia charakterystyki służy układ, którego schemat blokowy przedstawiono na rys. 6.10. Na wale silnika badanego umieszcza się koło zamachowe o momencie bezwładności zalecanym przez normę [3],
Wyszukiwarka
Podobne podstrony:
instalacje148 6. BADANIA SILNIKÓW SKOKOWYCH 176 Pomiar kąta można zastąpić pomiarem czasu obrotu. Wt
instalacje143 6. BADANIA SILNIKÓW SKOKOWYCH 166 Rys. 6.10. Układ do zdejmowania charakterystyki gran
instalacje146 6. BADANIA SILNIKÓW SKOKOWYCH 172 Zatem, moment bezwładności wirnika silnika skokowego
instalacje139 6. BADANIA SILNIKÓW SKOKOWYCH 158 — znamionowy kąt skoku as silnika
instalacje144 6. BADANIA SILNIKÓW SKOKOWYCH 168 była niedoskonałość sprzęgła, które nie zapewniało t
instalacje145 6. BADANIA SILNIKÓW SKOKOWYCH 170 Rys. 6.13. Odpowiedź silnika FA-34-4-1 na skok jedno
instalacje149 6. BADANIA SILNIKÓW SKOKOWYCH 178 Układ sterujący zadawaniem momentu oporowego
instalacje141 6. BADANIA SILNIKÓW SKOKOWYCH 162 momentów (0-=-7,5 oraz 0-=-15 N* cm). Dokładność pom
60323 instalacje140 6. BADANIA SILNIKÓW SKOKOWYCH 160 Pomiaru momentu dokonuje się za pomocą ciężark
instalacje147 6. BADANIA SILNIKÓW SKOKOWYCH 174 Uzyskuje się zależność wiążącą moment silnika skokow
więcej podobnych podstron