instalacje141
6. BADANIA SILNIKÓW SKOKOWYCH 162
momentów (0-=-7,5 oraz 0-=-15 N* cm). Dokładność pomiaru momentu wynosi 3%.
Pomiary przeprowadza się następująco. Po zamocowaniu silnika zeruje się układ mostka, a skalę kątową ustawia się w ten sposób, aby wskaźnik układu optycznego był ustawiony na zerze skali. Przesuwając następnie za pośrednictwem reduktora wał silnika o określony kąt, odczytuje się moment na skali przyrządu wycechowanej w N-cm.
W idealnym przypadku charakterystyki kątowe momentu statycznego powinny być identyczne dla każdego pasma (przy jednopasmowym zasilaniu) lub dla każdej kombinacji pasm (przy zasilaniu dwupasmowym). Lecz w przypadku silników rzeczywistych występują różnice, uwidocznione na rys. 6.6. Za maksymalny statyczny moment synchronizujący przyjmuje się najmniejszy z maksymalnych momentów pasm.
6.2.2. Określenie błędu statycznego skoku Aas silnika
Zgodnie z normą BN-81/3016-10 [3] błąd statyczny skoku silnika nie powinien przekraczać:
— przy skoku znamionowym do 45'— ±20% wartości znamionowej skoku;
— przy skoku znamionowym do 5°— ±5% wartości znamionowej skoku;
— przy skoku znamionowym ponad 5° do 15°—±3% wartości znamionowej skoku;
— przy skoku znamionowym ponad 15°~ ±2% wartości znamionowej skoku.
Określenie błędu statycznego skoku wykonuje się z zastosowaniem podzielnicy optycznej, wyposażonej w uchwyt mocujący silnik skokowy (np. precyzyjny uchwyt samomocujący tokarski). Jako wskaźnik położenia wału silnika stosuje się przetwornik położenia kątowego (np. sełsyn transformatorowy lub transformator położenia kątowego).
Po zamocowaniu silnika w uchwycie podzielnicy optycznej należy obracając jej głowicę, znaleźć zero napięcia wyjściowego z przetwornika położenia kątowego. Następnie przełącza się uzwojenie silnika w taki sposób, aby wykonał on jeden skok i znajduje się najbliższe nowe położenie głowicy podzielnicy optycznej odpowiadające zeru napięcia wyjściowego z przetwornika położenia kątowego. Różnica położeń głowicy podzielnicy optycznej, odczytana z jej skali, daje wartość skoku silnika.
Pomiar wykonuje się dla kolejnych skoków tyle razy, ile wynosi liczba skoków przypadająca na jeden pełny obrót silnika. Wyniki pomiaru przedstawia się graficznie, odkładając na osi rzędnych błąd bezwzględny, tzn. różnicę między skokiem znamionowym a zmierzonym, a na osi odciętych — numery kolejnych skoków.
6.2.3. Wyznaczanie charakterystyki Mstnwx = f(/)
Maksymalny moment statyczny wzrasta ze wzrostem prądu. Zależność Mst max = f (/) pokazano na rys. 6.7: dla silnika o wirniku reluk-tancyjnym (krzywa J) i dla silnika hybrydowego (krzywa 2). Kąt skoku obu silników wynosił 1,8°.
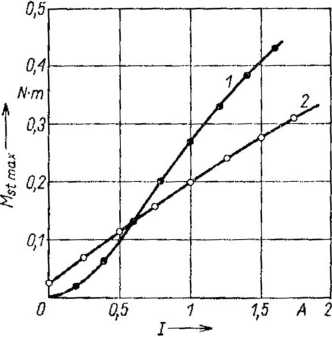
Rys. 6.7. Zależność maksymalnego momentu statycznego od prądu A7slma* = f(/) dla silnika skokowego (wg [2])
1 — reluktancyjnego; 2 — hybrydowego
Można zaobserwować, źe w przypadku silnika skokowego o wirniku reluktancyjnym, przy braku wzbudzenia moment jest równy zeru, a przy małych wartościach prądu wzrasta parabolicznie. Przy dużych wartościach prądu szybkość narastania momentu jest nieduża w związku z nasyceniem obwodu magnetycznego.
W silniku hybrydowym (lub o magnesach trwałych) moment występuje nawet przy braku wzbudzenia. Jest to moment ustalający poło-
Wyszukiwarka
Podobne podstrony:
instalacje149 6. BADANIA SILNIKÓW SKOKOWYCH 178 Układ sterujący zadawaniem momentu oporowego
instalacje146 6. BADANIA SILNIKÓW SKOKOWYCH 172 Zatem, moment bezwładności wirnika silnika skokowego
60323 instalacje140 6. BADANIA SILNIKÓW SKOKOWYCH 160 Pomiaru momentu dokonuje się za pomocą ciężark
instalacje147 6. BADANIA SILNIKÓW SKOKOWYCH 174 Uzyskuje się zależność wiążącą moment silnika skokow
instalacje139 6. BADANIA SILNIKÓW SKOKOWYCH 158 — znamionowy kąt skoku as silnika
instalacje142 6. BADANIA SILNIKÓW SKOKOWYCH 164 żenie wirnika. Można zaobserwować, że charakterystyk
instalacje143 6. BADANIA SILNIKÓW SKOKOWYCH 166 Rys. 6.10. Układ do zdejmowania charakterystyki gran
instalacje144 6. BADANIA SILNIKÓW SKOKOWYCH 168 była niedoskonałość sprzęgła, które nie zapewniało t
instalacje145 6. BADANIA SILNIKÓW SKOKOWYCH 170 Rys. 6.13. Odpowiedź silnika FA-34-4-1 na skok jedno
instalacje148 6. BADANIA SILNIKÓW SKOKOWYCH 176 Pomiar kąta można zastąpić pomiarem czasu obrotu. Wt
więcej podobnych podstron